

|
|
|
Навигация
|
Главная » Мануалы направлению с абсолютной угловой скоростью спутника. Следовательно, u = u)a - u) = :pg - = 0,624 об/час. Задача 6.33. В планетарной передаче кривошип О1О4 приводит во вращение колесо /, вращающееся вокруг неподвижной оси, про-ходянгей через О,. Колесо / должно вращаться с угловой скоростью о) соответствующей 10 000 об/мин. Зная радиусы колес: ri = 10 см, r.j = 16 см, Гз-8 см, Г4 = 6 см, найти угловую скорость Й, которую надо сообщить кривошипу, чтобы обеспечить требуемую угловую скорость первого колеса. Решение. Обозначим угловые скорости колес /, , IV, V через О) {).2, (Oi, (1)5 соответственно. Колеса и / составляют одно твердое тело и имеют общую угловую скорость щ. Выбираем ось z направленной перпендикулярно к плоскости чертежа, на читателя. Напишем уравнение Виллиса для первой пары колес: Аналогичное уравнение для колес 111 к IV имеет вид 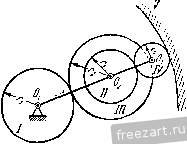 К задаче 6.33. так как угловые скорости колес и / одинаковы, а их радиусы различны. Для колес IV н V, находящихся во внутреннем зацеплении, имеем: Перемножим равенства (1), (2), (3). Тогда, учитывая, что колесо V неподвижно и, следовательно, = 0. находим: откуда 2 = (й1г - Подставляя в это уравнение значения всех величин, находим: 2,= 10 000.q /-fg g = - 1220 об/.чин. Знак минус означает, что направление вращения кривоишпа и первого колеса противоположны. Т 1 Задача 6.34. Вал газотурбинного двигателя делает 25 ООО об/мин. Зубчатое колесо / с внутренним зацеплением имеет z, = 120 зубцов и вращается как одно твер.тое тело с валом А Спаренные между собой передаточные шестерни 2 и 5 имеют соответственно го = 30 и z3 = 80 зубцов. Они насажены на общую ось и вращаются с одинаковой угловой скоростью. Зубчатое колесо 3 находится в зацеп-ле1Н1и с колесом 4, соединенным с валом, на котором насажен воздушный винт, делающий 1200 об!мин. о-тесо 4 имеет 2-4 = 20 зубцов. Определить угловую скорость, которую необходимо при этом сообщить кривоиншу, вращающему ось шестерен 2 \л 3. Решение. Для решения этой задачи применим способ Виллиса. Обозначим через i угловую скорость пала / и жестко связанного с ним колеса /, буквой 2 - у|..ювую скорость шестерен 2 и 5, буквой 4 - угловую скорость колеса 4 и жестко связанного с ним вала, на котором па-сажен воздушный винт. Искомую угловую скорость кривошипа, приводящего во вращение ось, на которой укреплены шестерни 2 и 3, назовем л„. Дадим мысленно основанию меха]щзма вращение с угловой скоростью - Ло, тогда кривошип остановится, а угловые скорости колес станут равными: и к задаче 6.34. колеса / колес ? и 5 колеса 4 Hi -На- J Для первой пары колес, находящихся во внутре1тем зацеплении, имеем: Hi-По г/ Для второй пары колес, находящихся во внешнем зацеплешш, находим: 4 - о Перемножая равенства (2) и (3), получаем: 1 - о , \ 1U -1Ц г, г/ Внося в это уравнение значения известных величин, имеем уравнение с одним неизвестным 25 000 -По 1200--/и 30.20 120-SO и„ = 23 600 об/мйн. JJli f> п> Задача 6.35. Водило 5 вращается вокруг вертикальной оси 00 с угловой скоростью Q. Водило несет на себе две вертикальные оси, на одной из которых свободно насажены три шестерни /, 2, 3, а на другой, также свободно, насажена шестерня 4. Шестерня 4 находится в зубчатом зацеплении с шестернями 1, 2, 3 и с неподвижной гпестерней 5. Числа зубцов шестерен 7, 2, 3 и 3 соответственно равны: (г-]- 1), z, (z~l) и Z. Определить угловые скорости ) u).j, Ш3 1иестерен 7, 2, 3. Решение. Запишем для каждой пары шестерен, находящихся в зацеплении, формулы Виллиса. Для пары шестерен 5 и 4 имеем: К задаче 6.35. о), - q 2 где и z обозначают соответственно угловую скорость и число зубцов шестерни сателлита 4. Формулы Виллиса для остальных пар шестерен, находящихся в зацеплении, будут: для пары J-4 для пары 2-4 для пары 3-4 . о :+1 z (2) (3) --1- Умножив равенство (1) на каждое из равенств (2), (3), (4), найдем: 1 - 2 г ы., - 0 г о), - Q г - а г -г Из этих трех формул определяются три искомые угловые скорости: ш.2 = 0; - Z-Г Таким образом, шестерня 7 вращается в ту же сторону, что и водило, шестерня 2 перемещается поступательно, а шестерня 5 вращается в сторону, противоположную вращению водила. Задача 6.36. В простой планетарной передаче (рис. а) с тремя соосными валами ведущий вал / приводит во вращение колесо радиуса г<!, находящееся в зацеплении с сателлитом радиуса Гз, наглухо закрепленным на валу . Вал закреплен в нодщипнике водила Н. На общем валу с сателлитом радиуса Гз закреплен второй сателлит радиуса г^, входящий в зацепление с колесом радиуса г^. Определить угловую скорость сателлитов радиусов Гз ri Vi колеса радиуса r-i- Найти скорости точек L, М, АГ(рис. б), если колесо радиуса Г5 = 90 см неподвижно, радиусы колес Га = 30 см, Гз = 40 см, Г4 = 20 см. Угловая скорость водила й= 1200 об/мин - = 40я сек'. Рещение. Метод плоского движения. В планетарной передаче, рассматриваемой в нащей задаче (рис. б), колесо радиуса Га и водило Н вращаются вокруг неподвижной оси О. 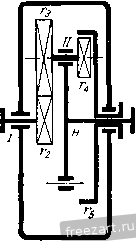 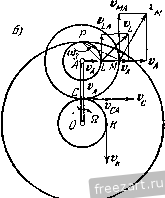 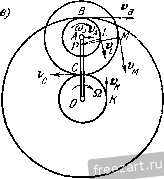 к задачам 6.36 и 6.37. Сателлиты с радиусами Гз и совершают плоское движение. Так как угловая скорость водила Q задана, то скорость точки А, принадлежащей водилу, равна г д = 2 ОЛ = 2 (Г.з + Гз) = 40it 70 = 2800it см1сек. Точка А одновременно является центром сателлитов радиусов и Г4, совершающих плоское движение. Мгновенный центр скоростей этих сателлитов, образующих одно твердое тело (так как они оба наглухо закреплены на валу), будет в точке Р касагшя сателлита радиуса Г4 с неподвижным колесом радиуса Гв- Зная величину скорости точки тела, совершающего плоское движение, и положение мгновенного центра скоростей этого, тела, можно определить его угловую скорость V. V. 2800я где АР - расстояние от точки А до мгнове1шого центра скоростей. Угловая скорость со, = ( 4, так как оба сателлита движутся как одно тело. Для определения угловой скорости колеса радиуса определим скорость точки С. Точка С является общей для сателлита радиуса Гз и колеса радиуса r<i. Считая, что точка С лежит на сателлите, определим ее скорость по формуле; г/с = шз СР = с03 (Га -- Г4) = 140тг. 60 = 8400тг см/сек. Зная скорость точки С и считая ее принадлежащей колесу радиуса Tj, определим угловую скорость этого колеса с с 8400II =C-O = f = T=270. Скорость точек L п М, принадлежащих сателлитам, определим по формулам: г./.=соз./.Р=созГ41Л2= 140тг.201Л2 = 3940тт см/сек, Vj = <i-MP = шзVr\ + г§ = 14O11 44,7 = 62601Г cMJceK, где LP и MP - расстояния от соответствующих точек до мгновенного центра скоростей. Точка К лежит на колесе радиуса г^, вращающемся вокруг неподвижной оси О с угловой скоростью ш^, следовательно, ее скорость равна z)=u)jra = 270ii-30 = 8]00TT см/сек. Как и следовало ожидать, zt-zt- Метод Виллиса. Даем мысленно основанию механизма враще1ше с угловой скоростью - й = -40ii сек'\ тогда водило Н становится неподвижным, угловые скорости всех колес уменьшаются на эту величину, а колеса, находящиеся в зацеплении, можно рассматривать как колеса с неподвижными осями. 5-й г, Здесь взят знак плюс, так как при внутреннем зацеплении оба колеса с неподвижными осями вращаются в одну сторону. Из послед-пего равенства определим ш^: 61. -1200 90 - 1200 ~20 здесь a)(j = 0, так как согласно условию колесо радиуса гв неподвижно. Отсюда находим: (1)4=-4200 o6/mi!hz= -140г. сек~\ Такова же и угловая скорость колеса радиуса г^, составляющего одно тело с колесом Г4. Знак минус показывает, что вращение сателлитов Гз и Г4 происходит в сторону, противоположную вращещ!Ю водила. Для определения скоростей точек L и 7И воспользуемся формулой распределения скоростей в плоском движении (рис. в). За полюс примем точку А, так как скорость точки А известна по величине и направлению. Будем считать, что точки М и L движутся вместе с полюсом и вращаются относительно полюса, тогда скорости точек L и М соответственно будут: i = A-f ЛД. .М = А + Ш' где г .д = шз. /,Л = шз г4 = 140тс 20 = 2800тс см/сек, г),д = (Uj. Л1Л = (1)3 г! =: 140тс 40 = обООтс см!сек. Направления скоростей ф^, и Фд, указаны на рис. б. Теперь получим: i ул-\-щл = 2800-/2 = 39407Т см/сек, и аналогично т'д, =1/1+= 2800-У5 = 62007: см/сек. Скорость точки к равняется скорости точки С, а последняя равна с= л + сл- Применяя формулы Виллиса, имеем для первой пары колес а - Q га - Q гз Знак минус взят потому, что при внешнем зацеплении колеса с неподвижными осями вращаются в противоположные стороны. Анало-1ично для второй пары колес находим: /1Р-4-Г4 9000г. ЛР-1-20 v~ ЛР 2800л ~ АР > ЛР = -~= 9,05 см. Определив положение мггювенпого центра скоростей и зизя величину скоростей Ид и Tig, найдем угловую скорость сателлитов Гз и д 2800л , = HP = W== Для определения угловой скорости (о^ найдем скорость точки С, считая ее принадлежащей сателлиту г^. Находим, далее, V(. = 0)3. СД = Ш3. Гз = 140к 40 = 5600:: см/сек. Для точки С направления и совпадают, поэтому V(. = -f = 2800г -1- 5600:: = 8 4 007: см/сек. Для точки К найдем и^. = (- = 8400:: см/сек. Задача 6.37. Решить предыдущую задачу, если колесо радиуса соединено с двигателем и имеет угловую скорость u)j = 3000 об/мпн ~ = ЮОт: сек~. Такая передача называется планетарной передачей с двойным приводом или дифференциальной передачей (рис. в). Решение. Метод плоского движения. В нлаиетарпой передаче с двойным приводом, изображенной на рис. а, колесо радиуса r.j, водило Н и колесо радиуса Гв вращаются вокруг неподвижной оси О. Сателлиты радиусов Гз и п, совершают плоское движение. Так как угловая скорость Q, задана, то скорость точки А, принадлежащей водилу, равна Vji = Q-OAQ (r.i -!- Гз) = 40г: 70 = 2800:: си/сек. Скорость точки В, лежащей на колесе / в, которое вращается покруг точки О с угловой скоростью (Од = 100- сек~\ равна г.д = . ш = 1 ООт:. 90 = 9000г: см/сек. Но точки А W В одиопременно принадлежат и сателлитам Гз и г^, которые совершают плоское движение как одно твердое тело. Зная величину и направление скоростей этих точек, можно определить положение мгновенного центра скоростей. Определим расстояние АР от точки А до мггювенпого центра скоростей. Величины скоростей точек при плоском движении прямо лропорциональны их расстояиия.м до мгновенного центра скоростей. Тогда 466 ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 1ГЛ. VI z) = Шз. СР = <йз (Гз - АР) = 956011 см/сек. Зпая скорость точки С я г^, находим: 0)., = - = --=319i: сек Гц 30 Скорости точек L, М, принадлежащих сателлитам, определяются но формулам: = соз. Z,P = 31 Oi: Vr[ 4- ЛР- = 31 On 22 = бЗООп с^/сек, г.д, = . Л4Р = 31 Он Yrl + ЛР- = 31 Он 41 = 12 ТООн /tew, где Z.P и MP-расстояния от соответствующих точек до мгновенного центра скоростей. Скорость z). = отрешен и е. Метод Виллиса. Применяя формулу Виллиса для первой пары колес, находящейся во внешнем зацеплении, имеем: -Q Гз - Q Га Аналогично для второй пары колес, находящейся во внутреннем зацеплении, находим: <~0. г\ <йз - 2 r Из последнего равенства определим Ш4: .0-1200 90 3000- 1200 20 или 0)3 = 0)4 = 9300 Об/л<ггн = 31011 сек'. Знак плюс показывает, что направление вращения сателлитов совпадает с направлением вращения водила. Определение скоростей точек L п М можно сделать методом плоского движения, как показано выше. Сравнение показывает, что метод Виллиса проще метода плоского движения. Для приобретения навыков в решении задач на сложение вращений вокруг параллельных осей рекомендуется решить следующие задачи из Сборника задач по теоретической механике И. В. Мещерского, издания 1950 г. и более поздних лет: 585, 587, 588, 589, 592, 595, ГЛАВА VII ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ И СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ПЕРЕСЕКАЮЩИХСЯ ОСЕЙ. ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА § 1. Определение скоростей н ускорений точек твердого тела, вращающегося вокруг неподвижной точки Выберем неподвижную систему осей xyz с началом в неподвижной точке О и подвижную систему координат xVii с тем же ueirr-ром, жестко связанную с твердым телом. Линия ON, пересечение не-1ЮДВИЖН0Й плоскости ху и подвижной плоскости Ххух, называется линией узлов. Угол прецессии 6 измеряется от неподвижной оси х до линии узлов ON и считается положительным, если поворот с оси z виден против часовой стрелки (рис. 7.1). Угол прецессии лежит в неподвижной плоскости ху. Угол чистого, или собственного, вращения 9 расположен в подвижной плоскости Xi Vi и отсчитывается от линии узлов до подвижной оси ДГ]. Угол 9 положителен, если он виден направленным против часовой стрелки с конца оси z-i (рис. 7.1). Угол нутации б отсчитывается от оси z к оси z и считается положительным, если видеть поворот, смотря с линии узлов ON, происходящим против часовой стрелки. Уравнения движения твердого тела при вращении около неподвижного центра определяются заданием углов Эйлера как функций времени: Ф=/,(0, =р=Л(0. е=/з(0- (I*) 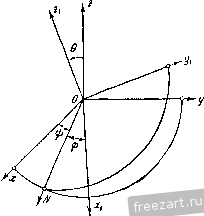 Рис. 7.1. Распределение скоростей и твердом теле, вращающемся около неподвижной точки, определяется формулой V=<i>Xr, (2*) где V-скорость точки, г-радиус-вектор течки, проведенный из неподвижного центра, со - угловая скорость твердого тела (рис. 7.2). Прямая, но которой нанраглена угловая скорость тела, называется мгновенной осью. Скорости всех точек твердого тела, лежащих на мгновенной оси, в данный момент равны пулю. Из формулы (2*) следует, что величина скорости любой точки тела г. = ш/г, (3*) где h - расстояние от точки до мгновенной оси. Проекции скорости на неподвижные оси координат определяются формулами: 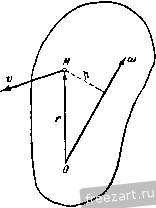 Vy - ш^х - mZ, (4*) Рис. 7.2. где X, у, 2 - координаты точки; <о^, ш^, - проекции угловой скорости на не-подппжпые оси х, у, z. Проекции скорости на подвижные оси Хь 2, равны xi=<y,Zy - i,Jy, Vy,= Xy - ux,Zi, v = >ix,Уl - y,Xl. (5*) R отличие от формул (4*), где координаты х, у, z меняются с течением времени, D уравнениях (о*) величины Xi, уц Zi - координаты Т0Ч1СИ тела в подвижных осях, связанных с твердым телом. Естественно, эти координаты остаются неизменными. Входящие в уравнения (4*) и (5*) проекции угловой скорости на неподвижные и подвижные оси координат вычисляются по известным углам Эйлера с помощью формул: ы = Ofe-f-9я 4-.fei, (6*) где k, п, ki - орты оси z, линии узлов ON и оси (рис. 7.1), Шд: = <? sin (}) sin 9 -]- os ш^=- cos (J) sin О-j-9 sin iJ), (o j = <p cos 9 -f iji, 1 ... 43 44 45 46 47 48 49 ... 51 |
 |
 |