

|
|
|
Навигация
|
Главная » Мануалы сительного движения вдоль нгатуна, находим, что скорость точки D равна сумме переносной относительной скоростей Переносная скорость есть скорость точки П шатуна, сов-падаюш,ей в данный момент с ползуном, а относительная скорость ф^, 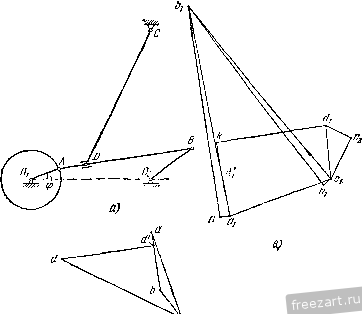 б) о К задаче б.ЗО. есть скорость ползуна при его движении вдоль шатуна. Так как переносная скорость 1) есть скорость точки D шатуна, совпадающей d данный момент с ползуном, то определяем ее, пользуясь свойством плана скоростей. Для этого делим отрезок аЬ на отрезки, пропорциональные AD и DB AD ad DB ~ db Тогда отрезок od представляет переносную скорость ползуна D. Через найденную таким образом точку d проводим на[1равленне относительной скорости параллельно шатуну АВ, а из точки о проводим направление абсолютной скоросги точки D, перпендикулярно 15 М, и Бать и др , т. I 450 плоское движение твердого тела [гл. vr к коромыслу CD до пересечения с направлением скорости iij, в точке d. Полученный отрезок od определяет скорость точки D. Измерив длину этого отрезка и умножив на масштаб, находим: г;д = 1780 cMJceK. Переходим к построению плана ускорений. Так как кривопшп 0\А вращается равномерно, ускорение точки А будет нормальным. Направлено оно вдоль кривошипа от точки А к точке О] и равно по модулю wa = 0,Л = 40 30 = 36 ООО cMJceK\ Из произвольной точки О] (рис. в) откладываем в масштабе вектор Oifl], равный ускоре[шю w- Переходим к определению ускорения точки В, которая одновременно принадлежит звену АВ и звену О^В. Ускорение точки В, как принадлежащей звену АВ, будем искать как геометрическую сумму ускорения полюса, центростремитель[Юго ускорения, направленного к полюсу, и вращательного ускорения вокруг полюса. Принимая за полюс точку А, имеем: Ускорение ча на плане ускорений уже есть. Вращательное ускорение wjf направлено перпендикуляр[[о к звену АВ, а центростремительное ускорение oi направлено вдоль звена АВ и равно по модулю иа- АВ Модуль вращательной скорости точки В вокруг точки А, как мы уже определили, равсЕ! 760 см/сек. ТоЕда в. = =3210 см/сек^ Для построения ускорения точки В к вектору прибавляем вектор Wg. через конец которого, обозначенный точкой п, проводим направление ускорения гоР,. Где-то на этой прямой должен находиться конец вектора oi, но так как величина wp и направление ускорения точки неизвестны, многоугольник замкнуть нельзя. Рассмотрим теперь точку В как принадлежащую звену О^В и Егайдем ускорение точки В, как геометрическуЕО сумму нормального и касательного ускорений в -во, Модуль скорости г д, как мы уже определили, равен 460 см/сек. Тогда t2) ==3020 см/сек\ Касательное ускорение w известно но направлению, оно перне/1Ди-кулярно к OiB. Для построения ускорения точки В из точки плана ускорений проводим вектор г , через конец которого, обозначенный буквой 72 проводим направление ускорения w. Где-то на этой прямой должен находиться конец вектора Wg. Очевидно, это будет в точке пересечения направлений векторов iyPj и г , т. е. в точке bj. Соединив точку oj с точкой bi, получаем отрезок oibi, определяющий ускорение Wg. Измерив его и умножив на масштаб, находим тез = 51500 см/сек^. Переходим к определению ускорения ползуна D. Движение ползуна рассмотрим вначале как сложное движение, складывающееся из переносного движения вместе с шатуном АВ и относительного движения по шатуну. Тогда ускорение ползуна D согласно геореме Кориолиса равно сумме переносного, относительного ускорений и ускорения Кориолиса Переносное ускорение w - это ускорение точки D шатуна, совпадающей в данный момент с ползуном. Определяем его, пользуясь свойством плана ускорений. Для этого достаточно разделить отрезок на плане ускорений на части, пропорциональные AD и DB, AD aid[ ЬВ~ d\b Соединив найденную таким образом точку d[ с точкой Oj, находим ускорение точки П шатуна, г. е. переносное ускорение г . Действительно, по отрезок OjOj соответствует ускорению полюса г д, а отрезок Ojrfi равен сумме ддЧ-И'о'д. Таким образом. Нормальное ускорение Wg направлено ог точки В к точке Oj и равно по модулю Переходим, далее, к определению ускорения Кориолиса, модуль которого равен == 2 е г / ) Относительная скорость г , точки D определяется из плана скоростей, ей соответствует отрезок dd (рис. б). Ее модуль г>== 1240 см/сек. Переносная угловая скорость есть мгновенная угловая скорость шатуна. Ее модуль вА 760 до -1 Следовательно, a!)z=2-4,2.t240= 10 415 см/сек\ так как sin (©7;.)= sin 90°=гК Находим направление ускорения Кориолиса. Относительная скорость Vr точки D направлена по шатуну от точки D к точке А. Вектор направлен от пас перпендикулярно к плоскости рисунка. Следователыю, по правилу Жуковского ускорение Кориолиса точки D направлено перпендикулярно к АВ вверх. Откладываем его величину из точки d[ (рнс. в). Третья составляющая ускорения точки D, ее относительное ускорение а , направлена по АВ, но неизвестна по модулю. Поэтому из конца ускорения Кориолиса, точки k, можно провести только нанравление W. Где-то на этой линии должен находиться конец вектора ускорения гУд. С другой стороны, рассматривая точку D как точку, принадлежащую звену CD, найдем ее ускорение как сумму нормального и касательного ускорений Модуль нормального ускорения равен n = tJ-w= 1540 см/сек\ Нормальное ускорение направлено отточки D к точке С Для построения ускорения точки D из точки Oi плана ускорений откладываем вектор г 2) через конец которого, обозначенный буквой n.i, проводим направление ускорения w перпендикулярно к звену CD. Где-то иа этой прямой должен находиться конец вектора w. Очевидно, это будет в точке пересечения векторов и w, т. е. в точке rfi. Соединив точку fif, с точкой о получаем отрезок Oifif соответствующий ускорению гИд. Измерив его и умножив на масштаб, находим: а)д= 18 300 cMJceK\ Задача 6.31. Построить план линейных и угловых скоростей для редуктора, изображенного на рис. а. Редуктор состоит из водила Н, колеса / радиуса г, = 16 см, закреп- ле1Н10го неподвижно, сателлитов XI , и / радиусов Г|, = 11 см и г = -1 i =19 см, жестко скрепленных друг с друюм и свободно насаженных на колене водила Н, и ведомого колеса IV радиуса Г|,=8 см, заклиненного на валу 4. Угловая скорость водила равна Q = 40i: сек~. Решение. Вычерчиваем шестерни редуктора (рис. б) в онредг-ленном масштабе: 1 см - тм. Проведем линию g - g, параллельную 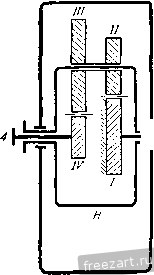 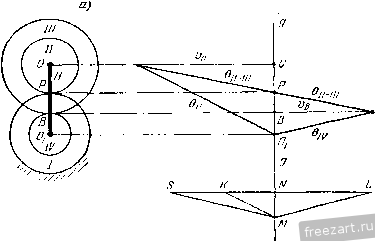 К задаче 6.31. линии центров 00, и спроектируем на нее точки, скорости которых известны: точкуОх - центр вращения водила Я и колеса IV, ее скорость 454 плоское движение твердого тела гл. vi 7<q = О, точку Р - мгновенный центр вращения сателлитов и /, ее скорость Vp - 0 и точку О-конец водила И, модуль скорое i и которой равен t Q = Q OOi = 40и (0,16 -- 0,11) = 33,8 м/сек. Вектор Vq направлен перпендикулярно к водилу влево. Построим Vq на плане скоростей в выбранном масштабе (1 см = к м/сек). Соединим конец вектора Vq с центром вращения водила, тогда прямая линия даст распределение скоростей па водиле Н. Соединяя конец вектора Vq с точкой Р прямой линией 9,получим распределение скоростей на сателлитах и Ш. Продолжим линию 0 до пересечения с направлением скорости точки в. Точка их пересечения определит скорость ч). Зная скорость точки в и положение цепгра вращения колеса IV, проведем прямую 9,у, которая покажет распределение скоростей на колесе IV. После построения плана линейных скоростей можно определить величины угловых скоростей всех элементов редуктора. Для этого на продолжении линии g - g выберем произвольную точку N и отложим от нее отрезок NM произвольной длины с (в нашем примере с=\ см). Из точки М проведем линии: MS параллельно 9, ,i. ML параллельно б^ и КМ параллельно 9. Отрезок NS=4,\ в масштабе даст модуль угловой скоро- СП1 в об/мин сателлитов 11-111 4,1-30-ft 4,1.30.6,55 u-m = -vrwrr=- .-0,1.1 =Q или в масштабе - модуль угловой скорости в радианах в секунду со -1211 = 1:1- = 270 сек-К П-П1 тс 0,1-1 Отрезок NL = S,8 см в соответствующем масштабе дает значение iv = - ТТГ^Г- = 3 об/мин. Отрезок Л7<=1,9 см даст значение угловой скорости водила Н 1,9 30-6,55 rijj = щ j 1200 об/мин, 1,9-6,55 , =-\гтг= Результаты расчетов зависят от точности построения и измерения графических величин. Допускаемая ошибка не превышает 2/о- § 6. Сложение вращений твердого тела вокруг параллельных осей При сложении вращений твердого тела, происходящих вокруг параллельных осей, могут встретиться три случая. 1. Переносная и относительная о), угловые скорости одного направления (рис. 6.19, а); в этом случае величина абсолютной угловой скорости равна сумме модулей составляющих угловых скоростей = + (I*) и направлена в гу же сторону, а абсолютный мгЕювенный центр вращения Р делит расстояние между переносным мгновенным центром Р^  Рис. 6.19. и относительным мгновенным центром Р^ на части, обрат11о пропорциональные величинам переносной и относительной угловых скоростей: (2*) 2. Переносная и относительная угловые скорости противополоЖ ных направлений (рис. б) м т равны друг другу по величине; в этом случае величина абсолютной угловой скорости равна модулю разности составляющих угловых скоростей и направлена в сторону большей из составляющих угловых скоростей (па рис. 6.19, б принято (й^Д а абсолютный мгновенный центр вращения Р делит расстояние между переносным мгновенным центром Pg и относительным мгновенным центром Р^ внешним образом на части, обратно пропорциональные величи11ам переносной и отно-сительгюй угловых скоростей: (4*) 3. Переносная и относительная угловые скорости противоположных направлений (рис. 6.19, в) и равны друг другу по величине; в этом случае величина абсолютной угловой скорости равна пулю, твердое тело совершает поступательное движение, скорости всех точек равны, они направлены терпендикулярно к прямой Р^Р^ и их модуль V = P,Pri, = PePrr (5*) При решении задач на определение угловых скоростей планетарных и дифференциальных зубчатых передач обычно применяются формулы Виллиса. 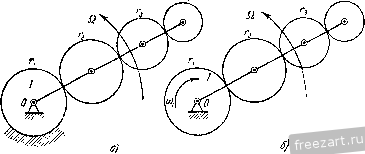 Рис. 6,20. Планетарной зубчатой передачей называется передача (рис. 6.20, а), у которой одно колесо неподвижно, а остальные колеса приводятся в движение кривошипом, ось врашения которого совпадает с осью неподвижного колеса; оси остальных колес находятся на кривошипе. Зубчатая передача называется дифференциальной (рис. 6.20, б), если колесо / вращается вокруг той же оси, что и кривошип. 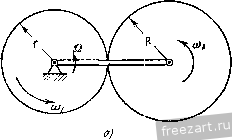 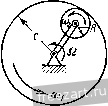 Рис. 6.21. Формулы Виллиса определяют зависимость между угловыми скоростями зубчатых колес дифференциальной и планетарной передач в случае внешнего и внутреннего зацеплений. В случае внешнего зацепления двух колес (рис. 6.21, а) зависимость между проекциями угловых скоростей колес (полагаем ось z направленной на читателя) определяется формулой 12 ;:г , Р 2 1С\*\ и„.-. о:- у- гГ где R, г - радиусы колес, Zy, z - число зубцов. Знак минус взят потому, что при внещнем зацеплении и неподвижных осях колеса вращаются в противоположных направлениях. В случае внутреннего зацепления двух колес (рис. 6.21, б) эта зависимость имеет вид Для получения формул (6*) и (7*) даем мысленно основанию механизма вращение с угловой скоростью, равной по величине угловой скорости кривошипа, но направленной в противоположную сторону. Тогда кривошип становится неподвижным, а угловые скорости всех колес уменьшаются на величину 2. После этого, рассматривая каждую пару колес, находящихся в зацеплении, можем написать основные соот;юшения как для пары зубчатых колес с неподвижными осями. Способом Виллиса определяются абсолютные угловые скорости всех зубчатых колес. Далее, используя формулы и методы определения скоростей и ускорений точек тела в плоско-параллельном движении, можно найти скорости и ускорения любой точки звеньев механизма. Можно поступить иначе. Сначала определить относительную и переносную угловые скорости и, далее, пользуясь теоремой сложения скоростей и теоремой Кориолиса, найти скорости и ускорения любой точки колеса. При решении задач на сложение вращений вокруг параллельных осей рекомендуется такая последовательность действий. А) В задачах на определение передаточных чисел, угловых скоростей, скоростей и ускорений различных точек планетарных и дифференциальных зубчатых передач, решаемых методом плоского движения: 1) даем мысленно основанию мехатшзма вращение с угловой скоростью, равной по модулю угловой скорости кривошипа и направленной в противоположную сторону; 2) составляем для каждой пары колес, находящихся в зацеплении, уравнение (6*) или (7*), выражающее зависимость между угловыми скоростями зубчатых колес; 3) для определения угловой скорости крайнего зубчатого колеса перемножаем все уравнения, составленные для каждой пары колес; значения угловых скоростей промежуточных колес (сателлитов) при этом сокращаются и находится угловая скорость крайнего колеса; 4) зная угловую скорость крайнего Ko.ieca и скорость его центра как точки, принадлежаитей одновременно и колесу и кривошипу, определяем положише мгновенного центра скоростей крайнего колеса; 5) находим, зная мгновенный центр и мгновенную угловую скорость, скорость любой точки колеса; 6) определяем ускорение центра крайнего колеса как точки, принадлежащей кривошипу; 7) принимая центр крайнего колеса за полюс, находим ускорение точки колеса, которое известно по направлению, и далее угловое ускорение крайнего колеса, после чего находим ускорение любой его точки. Б) В задачах на определение относительной, переносной и абсолютной угловых скоростей, скоростей н ускорений точек, решаемых при помощи теоремы сложения скоростей и теоремы Кориолиса: 1) выбираем одно вращение за относительное и второе вращение за переносное, результирующее движение за абсолютное; 2) но двум известным угловым скоростям определяем третью угловую скорость; 3) пользуясь теоремой сложения скоростей, находим или относительную, или перепосную, или абсолютную скорость любой точки твердого тела; 4) пользуясь теоремой Кориолиса, определяем или относительное, или переносное, или абсолютное ускорение любой точки твердого тела. Задача 6.32. Искусственный спутник Земли, двигаясь по круговой орбите, имеет период обращения, вычисленный но отношению к системе координат, движущейся вместе с центром Земли поступательно, равный 1,5 часа. Определить его относительную угловую скорость по отношению к Земле, вращающейся вокруг своей оси, если орбита спутника совпадает с экваториальной плоскостью Земли и спутник летит: а) с востока иа запад, б) с запада на восток. Решение. Земля вращается с запада на восток, делая 1 оборот за 24 часа. Принимаем вращение Земли за переносное движение. Следователыю, значение переносной угловой скорости = 4 об/час. Абсолютная угловая скорость обращения спутника задана: \,= [ o6J4ac. Эта угловая скорость совпадает по направлению с 0) в случае б) и направлена в противоположную сторону в случае а). Согласно формулам сложения вращений для случая а) имеем: ш„ = ш,- - <й„ 01 куда < г = а + < . = уз + 21 = 0.708 об1час. С такой угловой скоростью будет двигаться спутник относительно Земли. В случае б) нере1ГОС1Ия угловая скорость Земли совпадает по 1 ... 42 43 44 45 46 47 48 ... 51 |
 |
 |