

|
|
|
Навигация
|
Главная » Мануалы термеханика Теоретическая механика япляется наукой, в которой изучаются перемеи1ения тел с течением времени (механические движения). Она служит базой других разделов механики (теория упругости, сопротивление материалов, теория нластлчности, теория механизмов и машин, гидроаэродннамика) и многих технических дисцигглин. В основе теоретической механики, как и всякой науки, лежа г представления и абстракции, отражающие главные черты изучаемых явлений. Рассмотрим некоторые из них. Количественная мера механического взаимодействия между физическими объектами - сила - характеризуется модулем, направлением н точкой приложения, т. е. япляется вектором. Во мгюгих случаях форма и размеры движущегося тела не играют существенной роли. Поэтому вводится понятие о материальной точке, не имеющей протяженности, но обладающей массой (мерой iHiepTHOCTH материальной точки). Вес физические тела в Toil или иной степени деформируемы. В тех случаях, когда этими деформациями можно пренебречь, материальное тело рассматривается как абсолютно твердое (или, короче, твердое), т. е. предполагается, что расстояния между любыми его точками остаются неизменными. Курс механики состоит из трех разделов - статики, кинематики и динамики. Возникшая в результате практической деятельности теоретическая механика развивается в неразрывной связи с техникой. За несколько столетий до нашей эры возникновение статики было вызвано расцветом строительства. Затем новый толчок дало развитие мореплавания, промышленности, военного дела и астрономии - в результате в XV - XVII веках возникли кинематика и динамика. Великие достижения последних лет - внедрение автоматизации в различные области техники, создание искусственных спутников Земли, запуск космических ракет и межпланетных лабораторий - обз'-славливаюг дальнейшее развитие теоретической механики, науки, созданной в результате усилий большого числа гениальных ученых и выдающихся инженеров. РАЗДЕЛ ПЕРВЫЙ СТАТИКА ТВЕРДОГО ТЕЛА Основные законы статики Статикой называется раздел теоретической механики, в котором рассматриваются задачи на равновесие твердых тел и преобразования одной системы сил в другую, ей эквивалентную. В основе теоретической механики лежат экспериментально установленные законы, справедливость которых проверена многовековой практической деятельностью человека. Основные определения н законы даны ниисе. Изолированной называется материальная точка, действием на которую других материальных тел можно пренебречь. Закон 1 (закон инерции). Изолированная материальная точка находится в покое либо движется равномерно и прямолинейно. Равномерное и прямолинейное движение материальной точки яг,-ляется движением по инерции. Под состоянием равновесия материальной точки и твердого тела понимают не только состояние покоя, но и движение по инерции. Для твердого тела существуют раз- личные вилы движения по инерции, например равномер- --ное вращение твердого тела f вокруг неподвижной оси. Закон 2. Твердое тело Рис. 1.1. находится в равновесии под действием двух сил только в том случае, если эти силы равны по модулю и направлены в противоположные стороны по общей линии действия (рис. I.I). Эти две силы называются уравновешивающимися. Вообще силы называются уравновешивающимися, если твердое тело, к которому приложены эти силы, находится в покое. Закон 3. Не нарушая состояния *) твердого тела, можно добавлять и отбрасывать уравновешивающиеся силы. Следствие. Не нарушая состояния твердого тела, силу можно переносить по ее линии действия в любую точку тела. Две системы сил называются эквивалентными, если одну из них можно заменить другой, не нарушая состояния т[!ердого тела.  Слово состояние здесь означает состояние движения или покоя. Равнодействующей называется сила, которая эквивалентна данной системе сил. Закон 4. Равнодействующая двух сил, приложенных в одной точке, приложена в той же точке, равна по модулю диагонали параллелограмма, построенного на этих силах, и направлена вдоль этой диагонали (рис. 1.2). По модулю равнодействующая равна RV F\-F\-- 2F, F, cos (/ >,). Закон 5 (закон равенства действия и противодействия). Силы, с которыми два тела действуют друг на друга, равны по модулю и направлены в противоположные стороны по одной прямой, т. е. ~fA*) (Nc. 1.3). Следует иметь в виду, что действие - сила, приложенная к телу В, и противодействие- сила, приложенная к телу А, не уравновеи1иваются, так как они при.южены к разным телам. Закон 6 (закон отвердевания). Равновесие нетвердого тела не нарушается при его затвердевании. Не следует при этом забывать, что условия равновесия, являющиеся необходимыми н достаточными для твердого тела, являются необходимыми, но недоста-  Рис. 1.2. Рис. 1.3. точны.ми для соотыетствую-щего нетвердого тела. Так, абсолютно жесткий стержень может находиться в рапиопесии под лейовнем двух Сил, равных но модулю и направленных вдоль стержня либо друг к другу, либо друг от друга (т. е. под действием как сжимающих, так и растягивающих сил), а нить, соответствующая этому стержню, может находиться в равновесии только под действием двух сил, направленных друг от друга. Под действием сил, направленных друг к другу, нить сомнется. Твердое тело называется свободным, если его движе1ще ничем не ограничено. В большей части технических задач встречаются лишь несвободные твердые тела. Буквы, обозначающие векторы, набраны в книге полужирным шрифтоль  } Иво1да активные силы называют задаваемыми. Несвободным называется такое твердое тело, на которое наложены связи, ограничивающие его движение в некоторых направле-1Н1ЯХ. Так, для лампы, подвешенной на шнуре, связью является шнур; для книги, лежащей на с голе, связью является стол; для лестницы, приставленной к стене, связями являются пол и стена. Для шара, катящегося но бильярдному столу, связью является поверхность стола и его борта. Сила, характеризующая действие связи на твердое тело, называется реакцией связи. Если считать силу, с которой твердое тело действует на связь, действием, то реакции связи является противодействием. При этом сила - действие при-т ложена к связи, а реакция связи прило-жена к твердому 1елу. уУ Все силы, действующие на твердое .г;-- тело, можно разделить на две группы: силы активные и реакции связей ). При этом активными следует считать все силы, не являющиеся реакциями связей. Таким образом, какая-либо неизвестная сила, не являющаяся реакцией связи, также являекя ак1ивной силой. Закон 7 (закон освобождаемо с i и 0 1 связей). 11есвободное твердое тело можно рассматривать как свободное, если его мысленно освободи 1ь 01 связей, заменив действие связей соответствующими реакциями связей. Эют :saK0H дает возмож110С1ь, в частности, применить к несвободному твердому телу условия равновесия, справедливые для свободного твердого тела. При этом следует, отбросив связи, наложенные на твердое тело, заменить их соответствующими реакциями связей. Затем надлежит рассмотреть равновесие этого несвободного твердого тела, как тела свободного, под действием активных сил н реакций связей. В большинстве задач на равновесие твердого тела следует, если ЭЮ возможно, сразу указать направление реакций связей, а затем определи 1ь их модули в ходе решения задач. Для облегчения определения направления реакций связей рекомендуется внимательно озна-иоми1ься L приведенными ниже примерами. 1. Если твердое тело опирается на идеально гладкую (без трения) поверхность, то реакция поверхности направлена но нормали к ней в шчке соприкословели i, т. е. перпендикулярно к касательной плоскости в данной точке поверхности (рис. 1.4). Такая реакция называется нор.иальной реакцией. 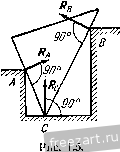 2. Если твердое тело в точках А ш В (рис. 1.5) опирается па ребра двугранных углов, а в точке С-на гладкую плоскость, то для направления реакций связи в точках А а В следует применить метод обращения, т. е. представить, что двугранный угол опирается на твердое тело (рис. 1.6), являющееся для него связью. Эта обращенная задача сводится к рассмотренному выше случаю 1, т. е. опорная реакция R направляется по соответствующей нормали. Снова обратив задачу, определяют искомое направление реакций в точках А и В, причем на основании закона равенства действия и противодействия: -R[\, -е- Реакция Rq, в соответствии со случаем 1, направляется перпендикулярно к горизонтальной плоскости (см. рис. 1.5). 3. Если твердое тело упирается острием в угол (например, лестница в выступ пола), то подобную связь следует рассматривать как двойную: угол А (рис. 1.7) препятствует перемещению твердого тела по горизонтали налево и по вертикали тыл. . Поэтому две составляющие опорной реакции следует направить противоположно этим перемещениям: первую - направо, вторую - вверх. (В подобных случаях реакцию зачастую ошибочно направляют вдоль АВ.) 4. Цилиндрическим шарниром называется совокупность неподвижного валика А и надетой на него втулки В, соединенной с твердым телом D (рис. 1.8). При этом твердое тело может поворачиваться вокруг оси валика. В точке соприкосновения С ьтулки с валиком возникает опорная 90° А Рис. 1.6. 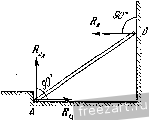 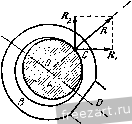 Рис. 1.7. Рис. 1.8. реакция, направленная по нормали к идеально гладким поверхностям соприкасающихся тел в точке касания. Так как положение точки С соприкосновения валика А с втулкой В заранее неизвестно, то невозможно сразу указать направление реакции R. ТЦп\ решении задач реакция /? заменяется двумя взаимно перпендикулярными составляю-ищми Л, и Ri. Определив в ходе решения задачи Л, и R, находят модуль и направление реакции R. Нетрудно видеть, что реакцию можно разложить на составляющие по любым двум направлениям, например на R, и R, или на и /?4 (рис. 1.9) и т. д. 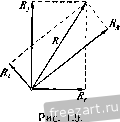 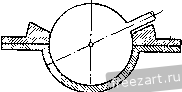 Г>ис. 1.10. Обычно, пренебрегая диаметром валика, по сравнению с другими размерами, составляющие Ri и R прилагают в центре О. 5. В случае сферического шарнира (рис. 1.10) также нельзя заранее указать положение точки соприкосновения и, следовательно, направление реакции R. При решении задач реакция R сферического шарнира заменяется тремя взаимно перпендикулярными составляющими Ri и /?з (рис. 1.11). 6. Если на твердое тело наложена гибкая связь (нить, канаг, 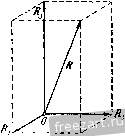 Рис. 1.11. Рис. 1.12. трос, цепь и др.), то реакция приложена к твердому телу в точке его 11[)икреиления к гибким связям. Реакция гибкой связи направлена гю касательной к связи в точке ее наложения (рис. 1.12). 7. Если абсолютно жесткий невесомый прямолинейный стержень, концы которого соединены шарнирами с другими частями комструк-нпн, находится в равновесии под действием сил, приложенных по его концам, то следует реакции направшь вдоль стержня. Действительно, если к стержню со стороны других частей конструкции приложены силы в каждом из его концов, т. е. в шарнирах, то после сложения сил оказывается, что в каждом из шарниров А Т, т; в S, А В о-*---с о - *-о--о- - Рис. 1.13. другу (рис. 1.13, а). Если стержень подвержен сжатию, то реакции стержня S.2 и 5о, приложенные к шарнирам, направлены вдоль стержня друг от друга (рнс. 1.13, б). Следовательно, F,= ~T, и F,= -T[ (рис. 1.13, а), а также F = - Sj, и = - (рис. 1.13, б). Так как F[ = -F и /2= -Р-ь то получим: Г,= -Г, и 5,==-S,. Решение задач на равновесие твердого тела, независимо от взаи.много расположения ириложенпых к телу сил, рекомендуется проводить вследуюнхем порядке; 1) выделить твердое тело, равновесие которого надо рассмотреть для отыскания неизвестных величин; 2) изобразить активные силы; 3) если твердое тело несвободно, то, при.менив закон освобожда-емости от связей, приложить к нему соответствующие реакнин связей; 4) рассмотреть равновесие данного несвободного твердого тела, как тела свободного, находящегося под действием активных сил и реакций связей; 5) использовать необходимые и достаточные условия (уравнения) равновесия в соответствии со в;!анмным расноложешгем сил, приложенных к твердому телу, и определить искомые вел.,<нН1Ы. приложено по одной силе. В результате стержень находится в равновесии под действием двух сил, приложенных в шарнирах. Согласно второму закону эти силы но модулю равиь! и направлены в противоположные стороны по сбн1ей линии действия, т. е. вдоль стержня. При этом стержень подвергается растяжению силами и F] (рис. 1.13, а) либо сжатию силами F. и F (рис. 1.13, б), причем F = -Fi и Fi- -F.2. Если стержень подвержен растяжению, то реакции стержня Г, и Т'и приложенные к шарнирам, на основании закона равенства действия и противодействия направлены вдс.ь стержня друг к А В f , А F2 В о-о-о-9---я-О Обращаем внимание читателя на то, что этот порядок является общим при решении любых задач на равновесие твердого тела. Методы применения пятого пункта и дополнительные рекомендации будут сделаны в соответствующих параграфах. Напомним, что в технической системе единиц сила измеряется в л;Г, а в системе единиц СИ -в н (ньютонах), причем 1 -r = 9,81 н. Г Л Л П А I ПЛОСКАЯ СИСТЕМА СИЛ § 1. Система сходящихся сил 1°. Равновесие твердого тела, к которому приложена система сходящихся сил. Сходящимися называются силы, линии действия которых пересекаются в одной точке. После переноса всех сил по их линиям действия в эту точку получается эквивалентная система сил, приложенных в одной точке. Равнодействующая R системы сил, приложенных в одной точке, приложена в той же точке и изображается замыкающей стороной силового многоугольника, построешюго на слагаемых силах, т. е. равнодействующая R равна векторной сумме слагаемых сил: 5,+ ... + /= = 2/=,. (1*) ft = i При построении суммы векторов (рис. 1.14) надо к концу первого слагаемого вектора приложить вектор F, равный второму слагаемому вектору F<i, к концу второго слагаемого вектора F присоединить вектор /3, равный третьему слагаемому вектору F, и т. д. Суммой векторов R является замыкающий вектор, начало которого совмещено с началом первого слагаемого вектора, а конец - с концом последнего слагаемого вектора. Если векторы изображают силы, то многоугольник OABCD, построенный на рисунке для четырех слагаемых сил, называется силовым, а его замыкающая сторона 0D является равнодействующей R. 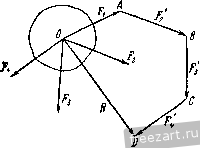 Рис. 1.14. Если все слагаемые силы лежат на одной прямой, то вершины силового многоугольника оказываются лежащими на одной прямой. Равнодействующая R этой системы сил лежит на той же прямой. На рис. 1.15 изображена равнодействующая четырех сил F, F, F и F, лежащих на одной прямой. (Для ясности изображения линии действия сил несколько сме-  Л /; с  Рис. 1.15. щены друг относительно друга.) Для равновесия твердого тела, к которому приложена система сходящихся сил, необходимо и достаточно, чтобы векторная сумма этих сил равнялась нулю: iP=:0, т.е. чтобы силовой многоугольник был замкнут. Это значит, что конец вектора последней слагаемой силы должен совместиться с началом вектора первой слагаемой силы. На рис. 1.1 в изображен замкнутый силовой \[ногоугольник, построенный на нити слагаемых силах. В случае равновесия твердого тела, к которому приложены силы, лежащие на одной прямой, вершины замкнутого силового многоугольника оказываются лежащими на прямой, вдоль которой в обоих направлениях отложены слагаемые силы, векторная сумма которых равна нулю (рис. 1.17). 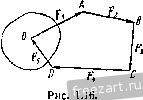  Рис. 1.17. При решении задач на равновесие твердого тела, к которому приложена плоская система сходя hi ихся сил, надо выполнить четыре первых пункта, указан-н ы X в начале книги, на стр. 15. Затем: 5) построить замкнутый силовой многоугольник (построение надо начинать с силы, известной как по модулю, так и но направлению); 6) реншв силовой многоуго.гьник, определить искомые величины. Если число активных сил и реакций связей, приложенных к твердому телу, находящемуся в равновесии, равно трем, то задача сводится к построению и решению силового треугольника. Задача 1.1. Однородный цилиндр М, вес которого Р = 20 кГ, лежит на гладкой горизонтальной плоскости. Сверху на цилиндр давит вертикальная сила f =50 кГ, ли1шя действия которой проходит через центр тяжести цилиндра. Определить давление цилиндра на горизонтальную плоскость. Решение. Рассмотрим равновесие несвободного цилиндра М (рис. а). К цилиндру приложены две активные силы: Р - вес,-вертикальная сила давления. Вес цилиндра приложен в его центре тяжести С и направлен но вертикали вниз. Сила давления совпадает но направлению с весом цилиндра. На цилиндр наложена одна связь - гладкая горизонтальная плоскость, препятствующая перемещению цилиндра по вертикали вниз. Применив закон освобождаемости от связей, заменим действие горизонтальной плоскости на цилиндр соответствующей реакцией Л (рис. б). Направим реакцию R в сто- м .\\\\\\\\\\\\\\\\\\v м рону, противоположную тому перемещению, которое- ограничено горизонтальной нлоскс-0 стью, т. е. но вертикали вверх. Теперь данное несвободное твердое тело можно рассмат-R ривать как тело свободное, к которому приложены активные силы /* и f и реакция горизонтальной плоскости R. К задаче 1.1. Эти три силы лежат на од- ной прямой. Если все слагаемые силы лежат на одной прямой, то вершины силового многоугольника оказываются расположенными на той же прямой. Изобразим вектор, равный силе Р, поместив его начало в произвольной точке. Из конца его, т. е. из точки А, проведем вектор, равный силе F. В конце его, т. е. в точке В, находится начало вектора R (рис. в). Так как при равновесии твердого тела сумма сил Р, F п R должна быть равна нулю, то конец вектора R должен совпасть в точке О с началом первой слагаемой силы Р (на рис. в для ясности изображения линии действия сил Я и и силы R несколько смещены друг относительно друга). Как следует из pic. в, R = Р-{- F. Подставив численные значения, получим R-70 кГ. Давление твердого тела на горизонтальную плоскость равно по модулю реакции R этой плоскости и направлено ей противоположно, т. е. но вертикали вниз. Задача 1.2. Однородный шар весом Р=:20 кГ опирается в точке А на гладкую наклонную плоскость, образующую угол а = 60° с горизонтом, а в точке В на выступ, находящийся на одной горизонтали с точкой А. Определить опорные реакции наклонной плоскости и выступа. Решение. Рассмотрим равновесие шара. К шару приложена одна активная сила - его вес Р, направлеипый по вертикали вниз. Шар 1 2 3 4 ... 51 |
 |
 |