

|
|
|
Навигация
|
Главная » Мануалы Пример 95. Определить относительную угловую скорость ведо мого колеса передачи по отношению к ведущему колес} / и абсолютную угловую скорость колеса , если известны радиусы колес и Г2 и угловая скорость ведущего колеса (рис. 373,а). Решение. Разложим абсолютное вращение колеса вокруг его центра (рис. 373,6) на переносное вращение вместе с колесом / вокруг его центра с угловой скоростью ш^ = ш^ и относительное вращение по отношению к колесу / с угловой скоростью ш^. Мгновенным центром относительного вращения Р^ является точка соприкасания колес: эта точка колеса не участвует в движении по отношению к колесу /. Если двигаться вместе с колесом /, то можно увидеть дви)1:ение колеса как качение по колесу /, т. е. как вращение вокруг точки Р^. По расположению точек Pg, Р^, Р (второй случай) показываем направление относительного и абсолютного вращений колеса и определяем модули их угловых скоростей: г, г. 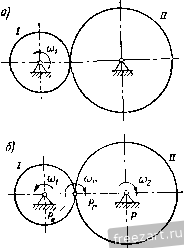 Рис. 373. + Гг Г, Пример 96. Кривошип OA, вращаясь вокруг оси О с угловой скоростью (uq по направлению движения часовой стрелки, приводит в движение зубчатое колесо , катящееся внутри неподвижного колеса /. Колесо приводит в движение колесо /, находящееся с ним в зацеплении и вращающееся вокруг оси О (рис. 374,а). Определить угловую скорость колеса /, если числа зубьев колес / и соответственно равны z и z- Решение. Разложим абсолютное вращение каждого колеса на два составляющих вращения: переносное вращение вместе с кривошипом вокруг оси О с угловой скоростью о> = (ор и относительное вращение по отношению к кривошипу с угловой скоростью ш,-,. Двигаясь вместе с кривошипом, видим движение каждого колеса как вращение вокруг его центра. Следовательно, относительное вращение каждого колеса происходит вокруг его центра и относительные угловые скорости колес обратно пропорциональны радиусам колес или их числам зубьев. в первую очередь устанавливаем относительную угловую скорость неподвижного колеса. Двигаясь вместе с кривошипом, видим неподвижное колесо вращающимся в направлении, обратном направлению вращения кривошипа, причем модуль его угловой скорости (Вд, = (рис. 374,6). Колеса и / образуют внутреннее зацепление, а поэтому направления их относительных вращений совпадают. Направления 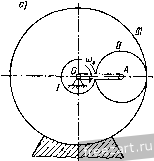 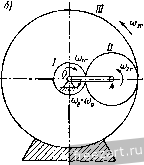 Рис. 374. относительных вращений колес / и противоположны, так как их зацепление внешнее. Пользуемся зависимостью между модулями относительных угловых скоростей: Перемножая части равенств, получаем откуда u)ir = зг = ТГ о- Так как направление относительного вращения колеса / совпадает с направлением переносного вращения, то модуль его абсолютной угловой скорости равен сумме модулей угловых скоростей переносного и относительного вращений: По чертежу (рис. 374,а) находим: Числа зубьев пропорциональны радиусам колес, т. е. 3 = 1+22. Тогда имеем >! = Ц'о - 1-= 1 +г2 Пример 97. Шестерня 4 планетарного зубчатого механизма, изображенного на рис 375,а, свободно насажена на конце рукоятки OA, которая вращается вокруг оси О неподвижной шестерни / с постоянной угловой скоростью (Oq против движения часовой стрелки. Ось двойной шестерни 2-3, соединенной с рукояткой OA, находится в зацеплении с шестернями 1 к 4; числа зубьев шестерен соответственно равны Zy z, z, 4. Определить, угловую скорость шестерни 4. Решение. Примем вращение рукоятки OA вокруг оси О за переносное вращение и найдем угловые скорости относительных вращений шестерен по отношению к рукоятке (рис. 375,6). Относительное вращение неподвижной шестерни 1 происходит вокруг оси О навстречу вращению рукоятки с угловой скоростью, модуль которой равен модулю угловой скорости рукоятки: >lr = U>0- Направление относительных вращений двойной шестерни 2-3 и шестер- Рис. 375. ни 4 показаны на рис. 375,6. Модули относительных угловых скоростей шестерен обратно пропорциональны числам их зубьев, т. е. 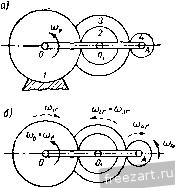 2Г 1 = 1± (б). Шестерни 2-3 связаны между собой жестко, а поэтому Перемножая (а) и (б), получаем 4Г Так как переносное и относительное вращения шестерни 4 направлены противоположно, то, полагая > ш^, найдем o как разность модулей ее переносной и относительной угловых скоростей: 27 а. а. Яблонский На рис. 375,6 абсолютное вращение шестерни 4 направлено в сторону переносного вращения, так как положено > ш т. е. или 1 > В случае 1 < направление абсолютного вращения шестерни противоположно указанному. Пример 98. Редуктор скоростей, изображенный на рис. 376,а, б. служит для передачи вращения от ведущего вала / ведомому валу , ось которого совпадает с осью вала /. Редуктор имеет два ведущих элемента: вал /, вращающийся с угловой скоростью 1 = 800 об/мин. 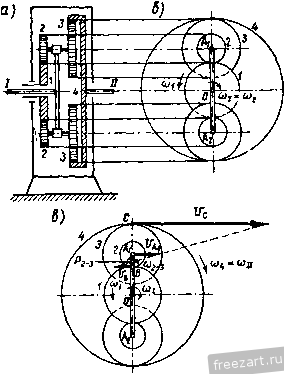 Рис. 376. и колесо /, вращающееся в противоположную сторону с угловой скоростью 1 = 200 об/мин. Ведущие элементы приводят в движение спаренные между собой шестерни 2-3, свободно насажен^ые на концах Л^ и этом шестерни а шестерни 3 шестерен Лз рукоятки. заклиненной на ведущем валу. При 2 находятся в зацеплении с ведущим колесом 1, с колесом 4, заклиненным на ведомом валу . От 3 получает движение колесо 4, к следовательно, и ведо- мый вал . Радиусы колес соответственно равны: rj = 30 см; Г2=15 см; Гз = 30 см; г^ = 75 см. Определить угловую скорость ведомого вала и шестерен 2-3. Решение. I способ. Применяем теорию сложения вращений тела вокруг параллельных осей. Предположим, что вращение ведущего вала с угловой скоростью Wj происходит по движению часовой стрелки, а вращение колеса 1 с угловой скоростью со, - в противоположную сторону (рис. 376,6). Разложим движение каждого элемента редуктора на два составляющих вращения: переносное вращение с валом, на котором заклинена рукоятка, несущая оси шестерен (в данной задаче вместе с ведущим валом /), и относительное вращение по отношению к этому валу. Вращение, принятое за переносное, происходит вокруг оси О с известной угловой скоростью Шg = ш^. Относительные вращения колес } и 4 происходят вокруг оси О, а колес 2-3 - вокруг осей и Лд, т. е. относительные вращения всех колес происходят вокруг осей, проходящих через их центры, и, следовательно, модули их угловых скоростей обратно пропорциональны радиусам или числам зубьев колес (см. § 95). Определим модули угловых скоростей и направления относительных вращений всех колес, пользуясь модулем заданной абсолютной угловой скорости колеса /. Так как колесо / вращается навстречу валу /, то его относительное вращение происходит в ту же сторону и модуль относительной угловой скорости (О] равен сумме модулей угловых скоростей lOj и Ш;, т. е. ir = / + u>r (а) Относительное вращение шестерни 2, образующей с колесом / внешнее зацепление, направлено противоположно относительному вращению колеса 1, т. е. по движению часовой стрелки. Шестерня 3, спаренная с шестерней 2, совершает это же движение. Колесо 4, образующее с шестерней 3 внутреннее зацепление, вращается в сторону вращения шестерни 3, т. е. по движению часовой стрелки. Модули угловых скоростей этих вращений определяются по формулам: = -. (В^ Так как >2г~ зг О, перемножив пропорции (б) и (в), получим = откуда 0.4, = о. ir Г2Г^ г2г4 Подставив значение coj определяемое формулой (а), получим Так как направления относительного и переносного вращений колеса 4 совпадают, то модуль его абсолютной угловой скорости 27 4П равен сумме модулей переносной и относительной угловых скоростей: 4 = e4- 4r = >/-f-t >/ + i)7- (г) Угловая скорость ведомого вала равна угловой скорости заклиненного на нем колеса 4. Вычислим ее модуль по формуле (г) в об{ман: п„ = = 4- (rt + ni) = = 800 + (800 + 200) = 1600 об/мин. Абсолютное вращение колеса 4 с ведомым валом происходит в сторону составляющих вращений, т. е. по движению часовой стрелки. Для определения движения шестерен 2-3 найдем модуль их относительной угловой скорости из пропорции (б): Так как направления относительного и переносного вращений шестерен 2-3 совпадают, то модуль их абсолютной угловой скорости равен сумме модулей относительной и переносной угловых скоростей: г = 4- 2т = >/ + ( >/ + >i)-. Вычисляя в об/мин, получаем 2 = Л/+(л^ + ni) = 800 + (800 + 200) -1- = 2800 об/мии. Абсолютное вращение шестерен 2-3 происходит в сторону составляющих вращений, т. е. по движению часовой стрелки. II способ. Применяем теорию плоского движения твердого тела. По модулям угловых скоростей ведущих элементов найдем модули вращательной скорости точки оси спаренных шестерен и вращательной скорости точки В касания колес / и 2 (рис. 376,8):
= Ш/ (i + Гз) = -g- 1С 45 = 1200ir CMJceK; 20 Уд == uiyfi = -g- IT. 30 = 200ic cMJceK. Отложим векторы Уд и по их истинным направлениям. Зная скорости точек Ау я В плоской фигуры, построим мгновенный центр скоростей шестерен 2-3 (§ 102) и определим его положение: Р^ д, 1200. р AQp в 2-3 в  (Од -Г- = Tg - -й- сек~. Так как 2-31+Я2 з5 = Г2= 15. Определим модуль скорости точки С: 300 *с 2-3 ~Т 10 10 10 Tii; = = ж- = X = 3 л. = 1200,г = 4000U сл/се . По модулю скорости одной из точек находим модуль угловой скорости шестерен 2-3: 1200it 280 30.i. 2-3 = : 2-3 = - = 2800 о(?Ми . По модулю скорости точки с, принадлежащей также и колесу 4, находим модуль его угловой скорости: 4000л 160я 160 = =-- = 1600 об 1 мин, п = п^=1600 обIмин. На рис. 376,8 показаны истинные направления вращений всех элементов редуктора. Пример 99. Рукоятка OA вращается вокруг оси О неподвижной шестерни радиусом г =10 см в направлении, противоположном направлению движения часовой стрелки, с постоянной угловой скоростью о = 2 сек~ и соединена с осями трех других шестерен того же радиуса (рис. 377,а). Найти скорость и ускорение точки В шестерни 4, лежащей в данный момент на конце диаметра, перпендикулярного оси рукоятки. Решение. Определим прежде всего абсолютную угловую скорость (04 шестерни 4. Для этого примем вращение рукоятки OA вокруг оси О за переносное вращение и найдем угловые скорости относительных вращений шестерен по отношению к рукоятке (рис. 377,6). Относительное вращение неподвижной шестерни / происходит вокруг оси О навстречу вращению рукоятки с угловой скоростью, равной по модулю угловой скорости рукоятки, т. е. Направления относительных вращений шестерен /, 2, 3, 4, образующих рядовое зацепление, показано на рис. ЪП,б. Относительная угловая скорость шестерни 4 определяется (см. § 95) по формуле! --1=- =1; 0.4,= о. = 0.0. Переносное и относительное вращения шестерни 4 происходят против движения часовой стрелки. Следовательно, ее абсолютное вращение направлено в ту же сторону, а модуль абсолютной угловой скорости равен: 0.4 = 0. + (04, = 2o.Q = 4 ceк~. Для определения скорости и ускорения точки В удобнее разложить плоское движение шестерни 4 не на два составляющих вращения, а на поступательное движение с полюсом А и вращение с угловой скоростью (О4 вокруг этого полюса. 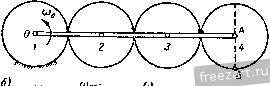  Рис. 377. Тогда скорость точки В определится как геометрическая сумма скорости полюса А и вращательной скорости точки В вокруг полюса А (рис. 377,6). Модуль скорости полюса А vj = OAwq = бгсоо = 6 10 2 = 120 см/сек. Модуль вращательной скорости точки В во вращении шестерни 4 вокруг полюса А VjiB = АВ (04 = 10 4 = 40 CMJceK. Модуль абсолютной скорости точки В - г;2 = /1202-4-402 :: 126 см/сек. Ускорение точки В определится как геометрическая сумма ускорения полюса А и ускорения точки В во вращении вокруг полюса А (рис. 377,8). При равномерном вращении рукоятки ускорение полюса вычисляется как центростремительное: то = то = О Л . 0)2 = 6ru)2 = 60 . 4 = 240 cMJceK. При равномерном вращении рукоятки щестерня 4 вращается равномерно и ускорение точки В во вращении шестерни 4 вокруг полюса А тоже является центростремительным: а'в = д = Л5-u)2 = ru)2 = io. 16 = 160 см/сек^. Модуль абсолютного ускорения точки В , = Ya + 2 = /2402 + 1602 =288,5 см/сек'. Пример 100. На рис. 378,а изображен механизм, называемый двойным дифференциалом. На кривошип /, вращающийся вокруг неподвижной оси АВ, свободно насажен сателлит fV, состоящий 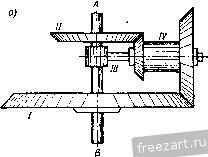  Рис. 378. из двух наглухо скрепленных между собой конических зубчатых колес радиусами ri = 6 см п гч = см. Колеса сателлита соприкасаются с двумя коническими зубчатыми колесами I к II радиусами R = \2 см и /?2 = 6 см, вращающимися вокруг оси АВ, но с кривошипом не связанными. Модули угловых скоростей колес / и , вращающихся в одном направлении, соответственно равны: (Оу = 4 сек~ и (Оуу = 8 сек~. Определить угловую скорость кривошипа / и угловую скорость сателлита IV по отношению к кривошипу. Решение. Сателлит IV участвует в двух вращениях вокруг пересекающихся осей: в относительном вращении по отношению к кривошипу /, т. е. вокруг своей оси, и в переносном вращений вместе с кривошипом / вокруг оси АВ. По условию задачи требуется определить угловые скорости этих вращений и со. Так как известны модули угловых скоростей колес / и , то можно найти модули абсолютных скоростей точек Mi и М^ соприкасания сателлита с этими колесами: г>,==/?1. Ш/= 12 4 = 48 см/сек; ©2 = /?2 О;/ = 6 - 8 = 48 см/сек. Пусть колеса I н II вращаются против движения часовой^ стрелки, если смотреть сверху. Тогда, если смотреть справа, векторы V, и Vj будут направлены так, как показано на рис. 378,6. Переносные и относительные скорости точек М^ и М2 параллельны их абсолютным скоростям. Зададимся такими направлениями переносного и относительного вращений, чтобы в результате сложения переносной и относительной скоростей каждой из точек Mi и М2 получились абсолютные скорости и Уг- Предположим, что переносное вращение сателлита IV вокруг оси АВ, ест смотреть сверху, происходит против направления движения часовой стрелки, а его относительное вращение вокруг своей оси, если смотреть справа, - по направлению движения часовой стрелки. Тогда переносные и относительные скорости точек Му и М^ будут иметь направления, показанные на рис. 378,6. Уравнения, выражающие теорему о сложении скоростей, примут вид: г, - г, = vy, ve, + vr, = f 2. Здесь Подставив эти значения, будем иметь РЛ - х г = Rrw -f- rjU), = v2. Подставив числовые значения, получим 12(1) -6ш, = 48, 6(04-3(0, = 48, Решив систему уравнений, найдем (0 = 6 сек~, (О, = 4 сек~. 2ш^ - (О, = 8, 2ш^-4-ш, = 16. Положительные ответы указывают, что принятые направления относительного и переносного вращений сателлита совпадают с действительными. § 134. Общий случай сложения движений твердого тела. Аналогии со статикой В § 129 и 132 рассмотрено сложение вращений твердого тела ввкруг пересекающихся и параллельных осей и установлено, что сложение параллельных и пересекающихся векторов угловых ско- 1 ... 38 39 40 41 42 43 44 |
 |
 |