

|
|
|
Навигация
|
Главная » Мануалы Разложим абсолютное движение точки М на два движения: относительное движение вдоль полярного радиуса, т. е. вдоль оси Or, и переносное вращение вместе с осью Or вокруг центра О. Относительная скорость точки v, направленная вдоль полярного радиуса, называется радиальной скоростью; она равна скорости прямолинейного движения вдоль этого радиуса. 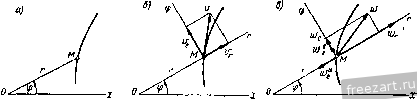 Рис. 351. Поэтому ее алгебраическая величина Переносная скорость v, называемая трансвереальной скоростью, как вращательная скорость точки М оси Or направлена перпендикулярно оси Or и имеет алгебраическую величину: = ГШ = rtp Тогда модуль абсолютной скорости точки Абсолютное ускорение точки определяется по четырем составляющим, указанным на рис. 351,в: Алгебраические величины составляющих ускорений: дач = ru)2 = гср' dr так как при прямолинейном относительном движении №^ = 0. Здесь формула (126.2) принимает вид да = 2срг. Для определения модуля абсолютного ускорения найдем его проекции на оси полярных координат: W = W - = г - Гср2; да = ffi + с ~ ~1~ 2? Г . Тогда COS (w, r) = ; cos (w, 9) = пример 89. Точка М, находящаяся в начальный момент в вершине кругового конуса, движется равномерно по образующей конуса к основанию, с относительной скоростью 11 = 24 см/сек. Конус вращается вокруг своей оси в указанном на рис. 352,о направлении, согласно уравнению ср = 0,125/2. Определить абсолютные скорость и ускорение точки в конце 4-й сек, если ЛОЖ = а = 30°. 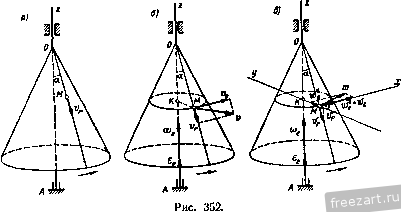 Решение. Подвижную систему отсчета свяжем с вращающимся конусом. Движение точки Ж по отношению к конусу вдоль его образующей является относительным, а движение точки Ж вместе с конусом, вращающимся вокруг оси Az, - переносным. Траектория относительного движения точки Ж - образующая конуса, по которой движется эта точка. Траектория переносного движения точки Ж в данный момент - окружность, которую описывает точка конуса, совпадающая в этот момент с точкой Ж (рис. 352,6). Определим положение точки Ж в конце 4-й сек: ОЖ==1;,/==24. 4 = 96 см; МК = ОЖ sin 30° = 96 . 0.5 = 48 см. Определим переносную угловую скорость и переносное угловое ускорение по формулам (91.2) и (91.3) 1Я = -!- при / = 4 сек. = 0.25; (о, = 0,25 -4=1 сек d< e = 0,25 сек- . Векторы и Sg направлены по оси вращения конуса вверх (§ 94), 1. Определение абсолютной скорости точки Ж. Абсолютная скорость точки М в конце 4-й сек определяется как геометрическая сумма двух скоростей: v = v,--v,. Переносная скорость направлена по касательной к траектории переносного движения, а ее модуль равен: у^ = Ж/С u) = 48 1 = 48 cmjcck. Относительная скорость направлена вдоль прямолинейной траектории относительного движения, т. е. вдоль образующей конуса, а ее модуль f = 24 cmjcck. Так как составляющие скорости взаимно перпендикулярны, то имеем (рис. 352,6) v = /of+lT? = /482+242 = 53,64 cmjcck. 2. Определение абсолютного ускорения точки М. Абсолютное ускорение точек Ж при вращательном переносном движении определяется: W = We + w +w + Wr + Wc. Определим составляющие абсолютного ускорения точки М (рис. 352;в). Переносное вращательное ускорение w направлено по касательной к траектории переносного движения точки в соответствии с направлением углового ускорения е^, а его модуль равен: дав Ж/С = 48 0,25= 12 см/сек'. Переносное центростремительное ускорение w? направлено к центру кривизны К траектории переносного движения, а его модуль равен: да = Ж/С u)2 = 48 . 1 = 48 cmjcck. Относительное движение точки равномерное, а потому = 0. Так как относительное движение точки - движение прямолинейное, то - = 0. rri р Направление поворотного ускорения w определяем по правилу Жуковского; оно совпадает с направлением w, а его модуль равен: да = 2 f г sin а = 2 1 24 0,5 = 24 см/сек . Проектируя все составляющие абсолютного ускорения на оси х и у, направленные по касательной и нормали траектории переносного движения, получаем: да = тов + ге = 12 + 24 = 36 см/сек^; Тоу = = 48 см/сек^; = V w2 + y = /362 + 482 = 60 см/сек^. Направление абсолютного ускорения точки М определяем по косинусам углов: cos(w, i) = - = 0,6: cos(w, j) = - = 0,8. Пример 90. Диск вращается с постоянной угловой скоростью <й = 3 сек~ вокруг оси, совпадающей с его вертикальным диаметром. По диаметру диска, перпендикулярному оси его вращения, движется точка согласно уравнению д; = 20 81п-Л Определить абсолютные скорость и ускорение точки в конце 3-й и 4-й сек (рис. 353,а). 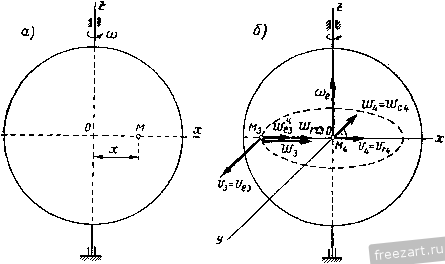 Рис. 353. Решение. Переносным движением точки М является движение точки вместе с диском, т. е. вращение с угловой скоростью o = u) = 3 сек~, а относительным - колебательное движение точки вдоль оси X. Траекторией переносного движения точки в рассматриваемый момент времени является окружность в плоскости, перпендикулярной оси вращения Oz, с центром О и радиусом, равным абсолютной величине координаты х (рис. 353,6). траектория относительного движения точки совпадает с осью х. 1. Определение абсолютной скорости точки. По теореме о сложении скоростей v = v, + v,. Переносная вращательная скорость точки М в любой момент времени направлена перпендикулярно плоскости диска, а ее модуль равен: Относительная скорость точки М является скоростью ее колебательного движения по диаметру диска, перпендикулярному оси его вращения. При колебательном движении определяется обычно алгебраическая величина скорости: 1) = игд-== lO-rccos-J {cMJceK). При / = 3 сек X3 = 20sin-J 3 = 20(-1)=г 20 см; /?з = I д^з ] = 20 см; 1)3 = 20 3 = 60 см/сек; и^з= IOtccos--3 = 0, так как cos--tc = 0; 3 =г О^з = 60 CMJCCK. Направление абсолютной скорости точки V3 совпадает с направлением ее переносной скорости vg, которая направлена по касательной к траектории переносного движения в сторону вращения диска. При t = 4: сек j;4 = 20sin- 4 = 0, так как sin2Tc = 0; /?4 = 0; 1 ,4 = 0; г г4= IOtccos 4= 1011:= 31,4 см/сек. Относительная скорость ¥4 направлена по направлению оси х, так как ее проекция на ось х, найденная по уравнению движения, в этот момент положительна. Очевидно, что V4=Vr4 и 04 = 1)4 = 31,4 CMJCCK, т. е. направление абсолютной скорости совпадает с направлением относительной скорости, и их модули равны. 2. Определение абсолютного ускорения точки. По теореме о сложении ускорений при вращательном переносном движении: w = w + w + w + w + w. Переносное движение является равномерным вращением. Поэтому в любой момент времени дав = 0. Относительное движение точки - прямолинейное, колебательное движение, поэтому = 0, а алгебраическую величину касательного ускорения находим по формуле (85.6); ш^, = = - sin у / {cMJceK). Определим модули и направления составляющих абсолютного ускорения в заданные моменты времени (рис. 353,6). При i = 3 сек. Переносное центростремительное ускорение w 3 направлено к центру О траектории переносного движения точки, а его модуль равен те з = /?з (1)2 = 20 32 =г 180 CMJccK. Относительное касательное ускорение w.j направлено по прямолинейной траектории относительного движения точки и его алгебраическая величина равна: г= - 5тс2 sin у 3 =: 49,3 см1сек^>0. Так как Тогт > О, то ускорение wr, имеет направление оси х. Поворотное ускорение w3 точки М в этот момент равно нулю, так как 1)3 = 0. Таким образом, при / = 3 сек только два составляющих абсолютного ускорения и Wt3 не равны нулю и направлены по одной прямой в одну сторону. Направление абсолютного ускорения Wg точки М в конце 3 сек совпадает с направлением этих составляющих, а его модуль равен: 3 = e3+rt3= 180 + 49,3 = 229,3 см/сек^. При t = 4 сек. В этот момент R = 0, а потому = 0. Относительное касательное ускорение в этот момент а ,.,4= -511:2 sin - -4 = 0. Направление поворотное ускорение получается поворотом скорости в,4 на 90° в сторону переносного вращения <;4 = 2(и^Уг51п|- = 2 3 31,4 1 = 188,4 см/сек^. Таким образом, при t = 4 сек только одно составляющее ускорение Wj4 не равно нулю. Поэтому W4 = v/, т. е. направление абсолютного ускорения точки М в конце 4 сек совпадает с направлением поворотного ускорения, а его модуль равен модулю поворотного ускорения: 4 -с4~ 188,4 CMJceK. Пример 91. Шары центробежного регулятора Уатта, вращаю-тцегося вокруг вертикальной оси, благодаря изменению нагрузки машины, отходят от этой оси. Найти абсолютную скорость н абсолютное ускорение центров этих шаров, если в рассматриваемый момент регулятор вращается с угловой скоростью us = 4 сек~ и угловым ускорением е==0,8 сек , а угловая скорость расхождения шаров iOi = 2 сек и угловое ускорение ej = 0,2 сек~. Длина стержней / = 40 см, расстояние между осями их привеса 2е=10 см, а углы, образованные стержнями с осью регулятора а = 30° (рис. 354,а). 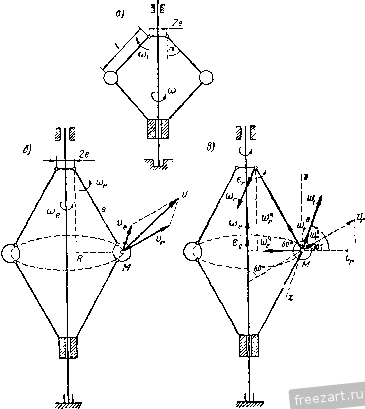 Рис. 354. Решение. Подвижную систему отсчета связываем с частями регулятора, вращающимися вокруг его оси. Переносным движением шаров является их вращение вокруг вертикальной оси с угловой скоростью 0) = 0) = 4 сек~ и угловым ускорением 6 = 8-= 0,8 сек~, а относительным - вращение стержней с шарами вокруг осей их привеса с угловой скоростью (й^ = (Oj = 2 сек~ и угловым ускорением = Sj = 0,2 сек~. Векторы (Og, Sg, to, изображены на рис. 354,е. Траекторией переносного движения центра каждого шара является горизонтальная окружность с центром на оси регулятора, проходящая через центр шара. Траектория относительного движения--это дуга окружности радиусом I, лежащей в плоскости регулятора, с центром на оси привеса стержня. Радиус окружности, являющейся в рассматриваемый момент времени траекторией переносного движения шара Я г=е +/sin 30° = 5 +40 0,5 = 25 см. 1. Определение абсолютной скорости центра шара. Абсолютная скорость центра каждого из шаров определяется как геометрическая сумма его переносной и относительной скоростей (рис. 354,6): v = v+v,. Переносная скорость центра шара Vg направлена по касательной к траектории переносного движения, а её модуль равен: Vg = R usg = 25 4=\00 см/сек. Относительная скорость центра шара направлена по касательной к траектории относительного движения, т. е. перпендикулярно к стержню, а ее модуль равен: 1 = /. (й, = 40 . 2 = 80 см/сек. Скорости Vg и Vr взаимно перпендикулярны. Модуль абсолютной скорости v = Уvl-{-vl = У100 +80 = \28 см/сек. 2. Определение абсолютного ускорения центра шара. Абсолютное ускорение центра каждого шара при вращательных составляющих движениях равно: W = W=.+ + + w? + w,. Найдем модули и направления составляющих ускорений (рис. 354в). Переносное вращательное ускорение направлено по касательной к траектории переносного движения в соответствии с направлением Sg, а его модуль равен: дав = . = 25 0,8 = 20 см/сек^. Переносное центростремительное ускорение w направлено к центру окружности, являющейся траекторией переносного движения центра шара, а его модуль равен; то = /? . u)2 == 25 16 = 400 см/сек^. Относительное вращательное ускорение центра шара Wr направлено по касательной к траектории относительного движения, т. е. перпендикулярно стержню, в соответствии с направлением е^, а его модуль равен: дав = /. = 40 . 0,2 = 8 см/сек'. Относительное центростремительное ускорение центра шара w направлено к центру траектории относительного движения, лежащему на оси привеса стержня, а его модуль равен: дац = Z. u)2 = 40 4 = 160 CMlceK. Поворотное ускорение центра шара имеет направление, определяемое по правилу Жуковского, а его модуль равен: да = 2(1)1 sin (tOg, v) = 2 4 80 0,866 = 554 cMJceK. Здесь v,) = 60°, sin(Q), v,) = 0,866 (рис. 354, e). Абсолютное ускорение точки, равное геометрической сумме пяти слагаемых, находим по способу проекций. Проводим оси координат с началом в точке М, направляя ось х по касательной к траектории переносного движения, ось у - вдоль ее радиуса, ось z - парал.тельно оси регулятора. Ускорения w, 4f, располагаются в плоскости yMz, ускорения и - на оси X. Вычисляем проекции абсо.тотного ускорения на оси' координат как суммы проекций составляющих ускорений на эти оси: да = - да - дав = - 554 - 20 = - 574 см/сек^; да = да cos 30° - да cos 60° - да = =.8 0,866- 160 0,5 -400 = - 473 см/сек'; да = дав cos 60° +да cos 30° = 8 0,5+ 160 0,866 = 142 см/сек'. Тогда модуль абсолютного ускорения да = ]/ да2+да2+да2 = (-574)2 + (--473)2 + (142)2 §69 см/сек'. Вопросы для самоконтроля 1. Дайте определение относительного, переносного и абсолютного движений точки, а также скоростей и ускорений этих движений. 2. Как определяют абсолютную скорость точки в составном движен!ш? 3. Как определяют абсолютное ускорение точки при непоступателыю.м переносном движении и при поступательном переносном движении? 4. Каковы причины появления поворотного ускорения? 5. Каковы модуль и направление поворотного ускорения и при каких условиях поворотное ускорение точки равно нулю? 6. Какой вид имеет выражение абсолютно о ускорения точки в случае, когда переносное движение представляет собой свободное движение твердого тела, и в случае, когда перепосное движение является вращением вокруг неподвижной оси? л ГЛАВА XIX СОСТАВНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА § 129. Сложение вращений твердого тела вокруг пересекающихся осей. Параллелограмм и многоугольник угловых скоростей Угловая скорость вращения твердого тела вокруг неподвижной оси согласно § 94 рассматривается как скользящий вектор, направленный вдоль оси вращения в такую сторону, чтобы, смотря ему навстречу, видеть вращение Ш тела, происходящим противоположно движению часовой стрелки. и, Ось вращения, положение которой в про- странстве изменяется со временем, называют мгновенной осью вращения тела. Как указывалось выше, мгновенная ось вращения представляет собой геометрическое место точек тела, скорости которых в данный момент равны нулю. Вектор угловой скорости тела в этом случае рассматривается так же, как скользящий вектор. Рис. 355. направленный вдоль мгновенной оси вращения Рассмотрим составное движение тела, представляющее собой совокупность двух вращательных движений тела вокруг осей, пересекающихся в одной точке. Примером такого движения является совокупность вращения диска вокруг оси 0L с угловой скоростью 2 и его вращения вместе с осью 0L вокруг неподвижной оси ОК с угловой скоростью ©1 (рис. 355). Вращение диска вместе с осью 0L вокруг оси ОК представляет собой переносное вращение, а его вращение вокруг оси 0L-его относительное вращение. Определим абсолютное движение тела, получающееся при сложении двух вращательных движений вокруг пересекающихся осей. Пусть твердое тело одновременно вращается вокруг двух мгновенных осей, пересекающихся в точке О (рис. 356), причем его вращение вокруг оси ОК является переносным, а вокруг оси 0L-относительным вращением. Предположим, что угловая скорость переносного, вращения тела равна w, а относительного вращения-w. Скользящие векторы угловых скоростей со и о), перенесем в точку О пересечения мгновенных осей и посгроим на этих векторах параллелограмм ОАСВ. 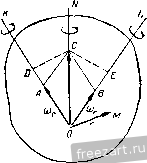 Рис. 356 1 ... 35 36 37 38 39 40 41 ... 44 |
 |
 |