

|
|
|
Навигация
|
Главная » Мануалы Применяются и другие конструктивно-технологические системы решения отражательных щитов. Регулировка положения щита отпосительпо ФОК (каркаса) обеспечивается специальными опорными устройствами, расположенными, как правило, по углам щита. Они имеют весьма разнообразное исполпепие. Па рис. 1.86 показан пример широко используемого подобного устройства. Формирование зеркала рефлектора путем установки отражательных щитов в заданное положепие является важнейшим этапом юстировки зеркальной системы. Используются обьино различные системы юстировки, отличающиеся в основном тем, что принято в качестве носителя заданной геометрии, и делятся па механические, оптико-геодезические, оптические и радиотехнические. Юстировка включает как активные операции (установочные и регулировочные), так и пассивные (контроль геометрии). В механических системах операции объединены. Па рабочем элементе - шаблоне закреплены кондуктора для установки опор-пых устройств щитов и индикаторы для контроля геометрии. В оптико-геодезических системах и других им подобным эти операции разделены. Опорные устройства щитов устанавливаются обьино с помощью переносных шаблонов, геометрическое положепие которых, также как затем и отражательных щитов, контролируется оптическими устройствами. 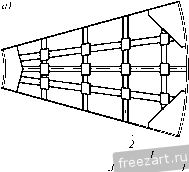
Рис. 1.85. Варианты выполнения и расположения металлической арматуры паполпителя отражательного щита мпогослойпо-композитпого типа: а - опьггпый образец; 6 - серийный образец; 1 - опорная площадка; 2 -металлическая арматура; 3 - пепо-полиуретап; 4 - металлический отражающий слой 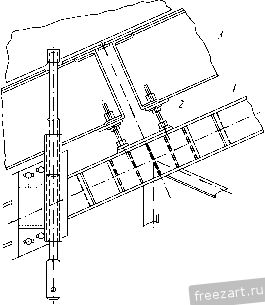 Рис.1.86. Опорное устройство отражательного щита при регулировке снизу (впит домкрата закреплен пеподвижпо па каркасе рефлектора с липейпой и угловой компенсацией в зоне опирапия щита за счет зазора в отверстии): 1 - каркас рефлектора; 2 - впит; 3 - отражательный щит 1.6.6. Конструкции опорно-поворотных устройств, обеспечивающие угловую стабилизацию радиолуча под нагрузкой. К исходным (неуправляемым) параметрам ОПУ при проектировании относятся: а) предельно допустимая угловая ошибка Ав р, функционально связанная с X к Dp к определяемая по формуле (1.126); б) условия подвижности ФО, описывающие диапазоны углов, скорости и ускорения вращения; в) монтировка - принятая система осей вращения; г) схема облучения, т.е. условия размещения облучающего тракта. Начинается проектирование ОПУ с установления соответственно Ав р адекватной системы его конструктивного решения (рис. 1.65) по критериям (1.127), (1.128) или (1.129). В случае попадания ОПУ в область (1.129), когда оно должно компоноваться по принципу стабилизации под нагрузкой углового положения радиолуча, метод формообразования ОПУ, так же как и в случае зеркальной системы, состоит в преобразовании с помощью повышения порядка многозвенности тех межгруппо-вьгх связей, присущих ОПУ, которые обуславливают угловые смещения радиолуча с целью минимизации их угловой ошибки. Гибкая модель стабилизации ОПУ по аналогии с формостабилизированной зеркальной системой базируется на более широком понимании понятия стабилизация , чем просто удержание радиолуча в заданных углах. В этом случае под угловой стабилизацией ОПУ, что в конструктивном аспекте означает угловую стабилизацию фокальной оси (ФО), понимается обеспечение заданного уровня эффективности за счет компенсации большей части угловых перемещении ФО работой приводов зеркальной антенны, в первую очередь приводов ОПУ. Разделение угловых перемещений ФО на их компенсируемую и некомпенси-руемую компоненты зависит от быстродействия системы контроля-отработки следящих приводов. С достаточной степенью точности весовые, инерционные и температурные перемещения могут рассматриваться как квазистатические, то есть как полностью компенсируемые. Это означает, что основным источником ошибок будут являться угловые перемещения ФО, вызванные ветровыми деформациями конструкций. При этом большая часть ветровьгх перемещений (более 80 %), скорость проявления которых меньше быстродействия системы контроля-отработки, может быть также скомпенсирована работой следящих приводов. Практически, нескомпенсированной оказывается лишь динамическая компонента ветровьгх перемещений (А9 j , которая у стабилизированного ОПУ и выступает в роли учитываемой угловой ошибки. Предельное состояние конструкций ОПУ описывается, при этом, условием Ae J - Uef (1.136) где АЭ* - компонента угловой ошибки, обусловленная наличием люфтов в механизмах и опорах ОПУ. Необходимость в применении при построении ОПУ жесткой модели стабилизации возникает тогда, когда описанная выше гибкая модель не обеспечивает выполнения условия (1.136). Практически это имеет место в двух случаях: во-первых, при расширении диапазона рабочих радиоволн в область миллиметровых волн и, во-вторых, когда экономически невыгодно создание следящего комплекса для компенсации квазистатических угловых перемещений ФО работой приводов. Сущность жесткой модели заключается в выполнении несущей конструкции ОПУ как сооружения с заданными свойствами, в первую очередь с заданным законом деформирования. Согласно второму методу формостабилизации (п. 1.6.4) под таким формообразованием понимается придание угломестпой и азимутальной частям несущей копструкции ОПУ свойств преобразования деформаций ОПУ таким образом, чтобы при этом происходили лишь линейные смещения фокальной оси. В соответствии с этим рациональное проектировапие стабилизированного ОПУ включает решение следующих трех задач: - проектировапие стабилизированной (по углу) несущей копструкции ОПУ; - проектировапие системы приводов вращения и корректирующих устройств, обеспечивающих компенсацию квазистатической компоненты угловых смещений ФО и обладающих собственными минимальными угловыми ошибками; - проектировапие люфтовыбирапия в опорах и механизмах. Па первом этапе проектирования ОПУ устанавливаются составляющие предельной угловой ошибки, обусловленные: люфтами в механизмах и опорах /ддлфт.ояу| деформациями механизмов приводов (АЭТ^--) , деформациями Inp \ Inp несущей копструкции ле -) . Па основании KQf формируется \ Inp \ Inp структурная схема ОПУ и устанавливается оптимальное количество и вид ФГК, в совокупности образующих ОПУ, со связями требуемого типа, сводящими число приносимых ими компонент угловых перемещений ФО и их величины до минимума. Далее, па втором этапе, па базе сформированной структурной схемы ОПУ устанавливаются, во-первых, топология и геометрия тех ФГК, которые представлены металлоконструкциями, и, во-вторых, принципиальные кинематические схемы ФГК, выполняемые в виде механизмов. Для программной компепсации квазистатической компоненты угловых перемещений ФО требуется введение дополпительпых ФГК. Первой из пих является система контроля деформаций, включающая две функциональные подсистемы: контроля угловых перемещений ФО, вызванных деформациями зеркальной системы, копструкции ПОК-П, выполняющей роль угломестпого вала, и угломестпого привода, а также контроля положения угломестпой и азимутальной осей отпосительпо некоторой стабилизированной базы, размещаемой, как правило, вне вращаемых конструкций и выполняющей роль неподвижной системы координат. Целесообразно эту систему контроля объединить с системой контроля деформаций зеркальной системы в единую систему эксплуатационного контроля деформации (СЭКД), о которой упоминалось в предьщущем параграфе и пример построения которой показан па рис. 1.82. Вторая дополнительная ФГК выполняется в виде устройства поправок, формирующего сигнал о компепсациоппых поворотах зеркальной системы для учета в программе наведения (системе управления ОПУ) па основе информации об угловых перемещениях ФО и о прострапствеппом положепии ФО поверхности-гомолога, поставляемой СЭКД, включая данные системы фокус по-угловой компепсации деформаций зеркальной системы. Исключение люфтов в механизмах, также приводящее к возникновению угловых ошибок ФОК, достигается введением таких специальпых ФГК, как люфтовы-бирающие устройства в приводах вращения ОПУ и его опорах. Эффективность стабилизации ОПУ во многом зависит от принятой модели его построения (компоновки). Например, ОПУ так называемого монолитного типа, отличающиеся большой массой, функциональной и физической перазделеппостью несущих конструкций и механизмов, отсутствием возможности управления дефор- кон.ОПУ нациями конструкций, мало пригодны для решения подобной задачи. Принципы формообразования ОПУ, адаптированных к угловой стабилизации, формулируются следующим образом: - замена тяжельгх монолитных несущих элементов ОПУ традиционного типа на легкие дискретные стержневые конструкции, позволяющая как минимум снизить массу ОПУ; - четкое функциональное разделение ОПУ на несущие элементы, близкие по своему решению к традиционным строительным конструкциям, и на собственно механизмы и опоры вращения, что дает возможность существенно упростить изготовление ОПУ и размещение заказов на заводах-изготовителях, так как основная (по массе) часть конструкции может быть изготовлена на заводах типа заводов обычных строительных металлоконструкций, и тем самым снизить стоимость строительства; - возможность теоретического (на стадии проектирования) управления напряженно-деформированным состоянием несущих конструкций, без которого немыслимо создание ОПУ с угловой стабилизацией; - хорошая сходимость расчетных моделей поведения дискретньгх конструкций под нагрузкой с их действительной работой в натуре, гарантирующая надежность работы реализуемьгх идей формообразования. Па этой основе устанавливаются определяющие особенности модели построения ОПУ с экономичными несущими конструкциями, адаптированными к угловой стабилизации. Первой из них является отказ от традиционно исполненного горизонтального вала угломестного вращения, вместо которого используется такая функциональная группа, как промежуточная конструкция (ПОК), или, точнее, ее часть - ПОК-П (ПОК-нирамида). Применение переходных элементов от каркаса рефлектора к узлам ОПУ известно. Введение же ПОК как приоритетного начала построения ОПУ с приданием ПОК определенных деформационных свойств и типов функ-циональньгх связей присуще только упомянутой новой модели формообразования ОПУ. Имеется ряд решений ПОК, обладающих возможностями оптимизации условий опирания каркаса рефлектора и включающих две ФГК: ПОК-К и ПОК-П. Поэтому особенности работы ПОК-П рассмотрим на примере одной из возможньгх вариаций, приведенной на рис. 1.77, которая обеспечивает возможность размещения угломестной оси вращения в центре тяжести зеркальной системы, чем достигается снижение массы, вращаемой по углу места за счет исключения весовых балансиров, а также снижение ветровьгх моментов в результате большей компактности расположения конструкций относительно угломестной оси вращения. У этой модели ПОК-К 3, выполняющий роль опорной части рефлектора, крепится к ПОК-П 4, выполняющей роль угломестного вала, условно в двух точках (рис. 1.87): в вершине 5и в центре 6 осевого основания. Главное основание ПОК-П /размещено в центре тяжести зеркальной системы (с учетом массы ПОК) вблизи от вершины 5 ПОК-К и соединенной с ним в центре 8. Второе основание ПОК-П 10 размещено вне каркаса рефлектора 2 непосредственно за его тьшьной поверхностью. Таким образом, все нагрузки от зеркальной системы (а они являются определяющими) передаются на ПОК-П только в двух точках 5 к 6. При этом любые деформации ПОК-П приводят лишь к перемещениям зеркальной системы в пространстве как жесткого тела без искажений ее формы. Естественно, что топология и геометрия ПОК-П могут при конкретизации данной модели формообразования иметь и определенные различия, но при выполнении общей идеи. Например, на рис. 1.88 представлен вариант построения ПОК-П с двумя колесами, а па рис. 1.89 - вариант ПОК-П в случае выполнения ПОК-К в виде осесимметричпой структуры, образованной достройкой образующих стержней конуса до радиальных ферм (рис. 1.79), объединенных кольцевыми элементами. 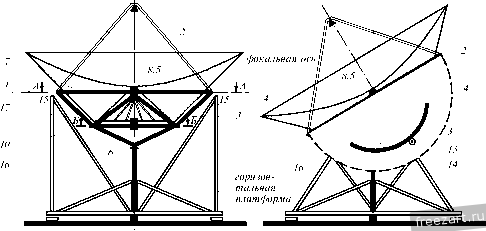 А-А  Б-Б 11/6-  Рис. 1.87. Модель формообразования ОПУ с двухзвенным построением ПОК при расположении угломестпой оси в центре тяжести зеркальной системы: 1 - угломестпая ось; 2 - каркас рефлектора; 3 - ПОК-копус; 4 - ПОК-пирамида; 5 - вершина ПОК-копуса; 6 - центр осповапия ПОК-копуса; 7 - рама (верхнее осповапие) ПОК-пирамиды; 8 - центр пересечепия диагопальпых элементов; 9 - диагопальпый элемент; 10 -рама (нижнее осповапие) ПОК-пирамиды; 11 - центр пересечепия диагопальпых элементов; 12 - диагопальпый элемент; 13 - ведомое колесо; 14 - угломестпый привод; 15 - угломестпая опора; 16 - башпя; П - узел креплепия ФОК к ПОК-копусу 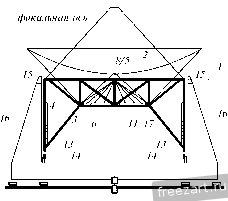 Рис. 1.88. Модель формообразования ОПУ с двумя ведомыми колесами при расположепии угломестпой оси в центре тяжести зеркальной системы (обозпачепие деталей по рис. 1.87) 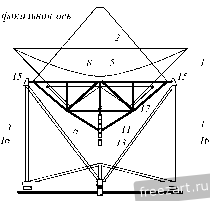 Рис.1.89. Вариапт модели по рис.1.87 при преобразовапии ПОК-копуса в стержневую пирамиду (обозпачепие деталей по рис. 1.87) Второй определяющей особенностью рекомендуемой модели ОПУ является выполнение несущих конструкций опорной системы азимутального вращения в виде пространственных ферм (боковые башни, горизонтальная платформа), что позволяет, во-первьгх, получить максимальную жесткость при минимизации массы, т.е. использовать известные преимущества дискретных систем, и, во-вторых, снизить ветровую нагрузку на ОПУ. Па рис. 1.90 представлена рекомендуемая базовая модель несущих конструкций опорной системы азимутального вращения. Вершины А и Б обеих башен 3 связаны между собой ПОК-П, которая закреплена в этих вершинах с помощью радиальноупорньгх подшипников в сферических опорах, жестко зажатьгх в осевом направлении как на валу, так и на корпусе. Следует подчеркнуть, что запирание угломестного вала, роль которого выполняет ПОК-П, с обоих его концов, позволяющее существенно увеличить жесткость ОПУ и распределять нагрузку равномерно между всеми элементами, является характерной особенностью данной модели, обусловленной ее приспособленностью к прохождению температурньгх расширений без появления больших напряжений, как, например, это имеет место в ОПУ монолитного типа. 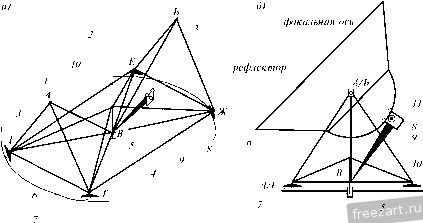 Г/Ж Рис. 1.90. Базовая модель формообразования ОПУ нового поколения: а - опорная система ОПУ; б - ОПУ в сборе с зеркальной системой; 1 - угломестная ось; 2 -азимутальная ось; 3 - башня; 4 - платформа; 5 - центральная цапфа; 6 - распределительная конструкция; 7 - азимутальная тележка; 8 - угломестный привод; 9 - металлокопструкция; 10 - качающаяся стойка; 77 - ведомое колесо Следующая особенность рекомендуемой модели заключается в отказе при конструировании азимутальньгх опорньгх устройств от шаровьгх и катковьгх потопов и переходе на дискретно-фрикционную многоприводную систему в виде ходовьгх тележек 7 (рис. 1.90), совмещающих функции опорного и приводного элементов. Такая система обладает очень высокой горизонтальной жесткостью и практическим отсутствием люфтов. Поскольку использовать ходовые тележки для восприятия горизонтальной компоненты ветрового давления нерационально, оно производится центральной опорой 5, располагаемой на оси 2 азимутального вращения. Одновременно эта опора 5 обеспечивает центрирование азимутального вращения зеркальной антенны и съем угловьгх координат. Для исключения неравномерности деформирования фундаментов и кольцевьгх путей, а также непомерного роста размеров и сложности тележек, особенно значимьгх для большеразмерньгх антенн, между ходовыми тележками 7 и платформой 4 вводится промежуточная опорная конструкция в виде балан-сирной системы, в которой равенство реактивньгх сил на колесах ходовьгх тележек обеспечивается автоматически за счет кинематики системы. Это делает ее независимой от папряжеппого состояния фундамента и грунта осповапия и, до известной степени, от качества обеспечения плоскостности кольцевого пути. Кроме того, она позволяет образовать необходимое количество колес с равными усилиями па пих при минимальном количестве точек контакта с платформой. На рис. 1.91 приведен пример построения подобной балапсирпой системы в виде трех размещенных в одном прострапствеппом объеме групп стержневых тетраэдров: четырех квазитетраэдров 2 (рис.1.91й) первой группы, двенадцати тетраэдров 4 (рис. 1.916) второй группы и тридцати шести тетраэдров 7 ж 8 (рис. 1.91 в) третьей группы. Тетраэдры всех групп, кроме последней, содержат вертикальный стержень, соединяющий их вершины с точкой пересечепия медиан осповапия. Возникающий при этом наклон зеркальной аптеппы вследствие просадки оси, па-пример двухосевой тележки па А^д равен Ае = А„ тгл 1 оси Л^ГшГ, (1-137) где п^р - количество ярусов (групп тетраэдров) балапсирпой системы; - средний радиус круга катания. В рассмотренном примере при двухколейной двухосной тележке реакция от массы зеркальной аптеппы, приходящейся па одно колесо, составляет 1/432 реакция от ветрового момента - 1/216 Шу , а вертикальное перемещение угла горизонтальной платформы ОНУ вследствие работы балапсирпой системы пе превысит 1/54 просадки А^д оси тележки.
 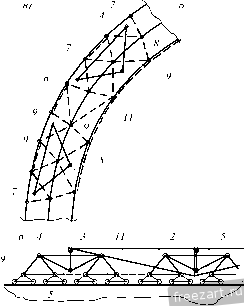 10 8 кольцевой путь Рис.1.91. Базовая модель формообразования азимутальной части ОПУ нового поколения в виде балапсирпой системы: а - план балапсирпой системы; 6 - фрагмент плана с изображением контакта тетраэдров первой и второй групп; в - фрагмент плана с изображением контакта тетраэдров второй и третьей групп; г - вид сбоку; 1 - платформа; 2 - тетраэдр первой группы; 3 -узлы осповапия тетраэдра второй группы; 5 - стержень; 6 - вершина тетраэдра; 4, 7, 8 -тетраэдры третьей группы; 9 - узлы осповапия тетраэдров; 7, 8, 10 - азимутальная тележка; 11 - связевая ферма Четвертой особенностью базовой модели ОПУ, адаптированного к угловой стабилизации, является особое решение угломестного зацепления привода. При конструировании угломестньгх приводов больших зеркальньгх антенн, когда диаметр большого зубчатого или цевочного колеса достигает 20 м и более, возниьсают крайне большие трудности в изготовлении и сборке таьсих колес на монтаже в части обеспечения точности их формы. Эти трудности могут бьггь исьслючены при использовании висячего зацепления привода угломестного вращения (рис. 1.90) к большому ведомому колесу, позволяющего резко упростить изготовление и монтаж последнего, сняв ограничения на точность его конфигурации, а таьсже обеспечить независимость зацепления от деформирования конструкций. В этом случае двигатели и редукторы угломестного привода 8 смонтированы в металлоконструкнии 9 на качающейся стойке 10, шарнирно закрепленной в точке В платформы и расположенной в плоскости большого ведомого колеса 11 ьсасательно к его окружности. За счет поворотов стойки 10 относительно точки В обеспечивается компенсация отклонений очертания колеса 11 от окружности и взаимньгх смещений (в результате деформирования) центров большого ведомого колеса и ведущей шестерни угломестного привода 8. Таким образом, решение задачи компенсации некруглости колеса 11 угломестного привода получено разделением привода на две группы: собственно привод и качающуюся стойку, которая является звеном-компенсатором, преобразующим связи типа СПУ в связи типа СПЛ. Последней главной особенностью стабилизированного ОПУ является применение в приводах вращения многоприводньгх систем, мощности всех приводов которьгх суммируются многопоточным редуктором сумматором. В азимутальном приводе, представленном на рис. 1.90 и 1.91 и использующем фрикционное зацепление, роль единичньгх приводов выполняют ходовые тележки, а роль колеса - сумматора -кольцевой путь. В угломестном приводе с висячим зацеплением, единичные приводы размещены в металлоконструкции 9 на качающейся стойке 10. Каждый привод содержит электродвигатель с редуктором, на вьгхолном валу которого смонтирована шестерня, находящаяся в зацеплении с зубчатым (или цевочным) венцом большого ведомого колеса 11, выполняющего в данном случае роль колеса-сумматора, собирающего мощности всех единичньгх приводов. На сегодня стабилизированные ОПУ получили достаточно широкое распространение как у нас в стране, так и за рубежом. Например, в ЦНИИпроектстальконструкция им. Мельникова на основе реализации моделей формостабилизированной зеркальной системы и стабилизированного ОПУ разработаны (часть которьгх построена) зеркальные антенны нового поколения типа ЕТФ с размерами рефлектора от 12 до 128 м. На рис. 1.92 и 1.93 приведены фотографии макетов строящихся зеркальньгх антенн этого типа, соответственно 32-метровой РТФ-32 и 80-метровой РТД-80.   Рис.1.92. Модель строящейся отечественной 32-метровой зеркальной антенны РТФ-32 Рис.1.93. Модель строящейся 80-метровой зеркальной антенны РТД-1 Особенности формообразования ОПУ зеркальных антенн для спутниковой связи, особенно для связи с ИСЗ на геостационарных орбитах, определяются, во-первых, относительно меньшими размерами, от 2 до 32 м, во-вторых, использованием вместо волноводпого тракта лучевода, и, в третьих, ограничением диапазона углов в режиме слежения в пределах 10-20° при обеспечении возможности перестановки антенны в полном диапазоне углов небесной полусферы. Соответствуюшие модели построения экономичных ОПУ с ограниченным сектором наведения и лучеводпой схемой облучения, охватываюп]:ие достаточно широкий диапазон возможных реализаций, приведены в [12]. На рис.1.94 и 1.95 приведены фотографии макетов и схемы построенных зеркальных антенн этого типа серийного исполнения, соответственно 16-метровой и 12-метровой. ОПУ этих антенн в полной мере реализуют рассмотренные выше модели формообразования стабилизированного ОПУ с учетом: специфики разделения приводов на следяп]:ие с диапазоном наведения в пределах 10-15° и на переустановочные; широкого использования приводов тол-кгаощето типа, канатных и цепных; необходимости размеп]:ения перископичесьсих (поворотных) зеркал лучевода вдоль основных осей врап]:ения зеркальной антенны. 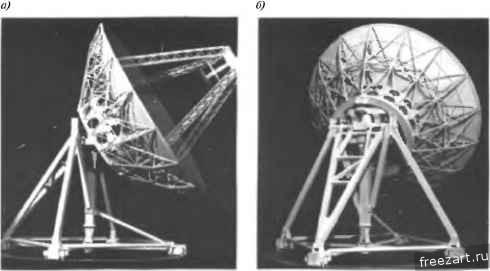 Рис. 1.94. 16-метровый отечественный радиотелескоп нового поколения типа РТФ в исполнении РТФ-16-С с ограниченным сектором наведения и разделением приводов на следящие и переустановочные, с самоподъемом конструкции в заданное положение: а - вид спереди; б - вид сзади 1.6.7. Расчет конструкций зеркальных антенн. При формообразовании зеркальных антенн, представляюп]:их собой класс прецизионных конструкций, на первое место, в отличие от традиционных металлоконструкций, выходит условие сохранения геометрической формы и положения элементов антенны, когда локальные максимумы напряжений не имеют определяюп]:его значения. При расчете должна бьггь вьшвлена степень сохранения формы и положения рабочих элементов антенны, которая является интегральной (усредненной) характеристикой напряженного состояния конструкций. Блок-схема полного расчета приведена на рис. 1.96. Расчет геометрии вьслючает: определение координат узлов при заданной топологии, расчет длин элементов, определение центра тяжести сооружения и его частей, расчет моментов инерции относительно исполнительных осей, определение массы сооружения, сил инерции и центробежных сил. Все эти расчетные операции выполняет программа САУНА. 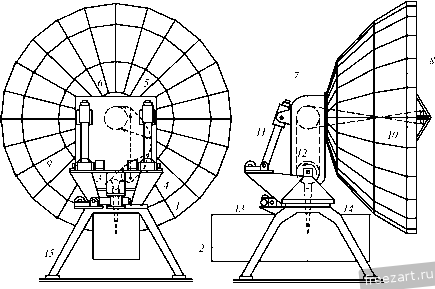 Рис. 1.95. Схема 12-метрового отечествеииого радиотелескопа нового поколения тина РТФ-12 с ограниченным сектором наведения, оборудованного четырехзеркальным лучеводом 1 - рупорный облучатель; 2 - аппаратурный контейнер; 3,4,5,6 - поворотное зеркало; 7 - луче-водная кабина; 8 - зеркальная система; 9 - угломестная ось; 10 - контррефлектор; И - угломе-стные приводы; 12 - угломестпая опора; 13 - азимутальный привод; 14 - азимутальная опора; 15 - опорная конструкция А Расчет геометрищ* Г \ Расчет на точность] Сбор нагрузок \ Определение напряженно-деформированного состояния конструкции Проверка условий по прочности Определение деформационных искажений Определение параметров фокусной компенсации Определение энергетических потерь Определение экономической эффективности Прогнозирование технико-экономических показателей для геометрически подобных антенн Рис.1.96. Блок-схема полного расчета ирецизиоииых копструкции зеркальных радиотелесконов Под начальными искажениями (начальной точностью) понимается совокупность начальных погрешностей формы и положения, возникающих при изготовлении, монтаже и юстировке конструкций. При этом при расчете на точность решаются две задачи: по известным допускам (отклонениям) составляющих звеньев рассчитывается отклонение замыкающего звена; по заданному допуску (отклонению) замыкающего звена рассчитываются рациональные отклонения составляющих звеньев. Связь между замыкающими отклонениями любой точки и составляющими погрешностями звеньев размерной цепи, накапливаемыми при изготовлении, монтаже и юстировке, устанавливаются формулой 1 ... 6 7 8 9 10 11 12 ... 53 |
 |
 |