

|
|
|
Навигация
|
Главная » Мануалы фигуры 0) на радиус-вектор Tqj. VoA==wX Год. Вращательная скорость у^д направлена перпендикулярно отрезку ОАу. в сторону вращения фигуры, и имеет модуль г од = ОЛ О). После подстановки получаем v = Vo + Vo (99.1) или Уд = Уо + о)ХГод. (99.2) Скорость точки А изображается диагональю параллелограмма, построенного при точке А на скорости полюса О, перенесенной в точку А, и вращательной скорости точки А вокруг полюса О (рис. 247). Следствие I. Проекции скоростей точек плоской фигуры на ось, проходящую через эти точки, равны. Положим, что в данный момент времени известна скорость точки А плоской фигуры, направление ее вращения и модуль угловой скорости фигуры u) (рис. 248). Приняв точку А за полюс, оп- 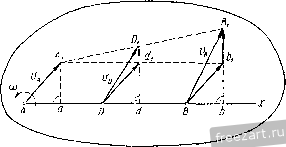 Рис. 248. ределим скорости точек В и D плоской фигуры, лежащих на одной прямой с точкой А: причем вращательные скорости этих точек вокруг полюса А: \jg = byBi и VAo = rfiDi направлены перпендикулярно отрезкам АВ и AD в сторону вращения фигуры. Проведем ось х через точки А, D и В и спроектируем скорости этих точек на ось х; тогда получим ~ АХ+ АВХ- вх- о = adx - - так как векторы \jg и у^д перпендикулярны оси x. Поэтому вх = ах ВЬ = Аа: dx = ax OdAa или Aa = Dd = Bb, т. е. проекции скоростей всех точек отрезка АВ на ось х, направленную вдоль этого отрезка, равны по величине. Следствие 2. Концы скоростей точек неизменяемого отрезка лежат на одной прямой и делят эту прямую на части, пропорциональные расстояниям между соответствующими точками отрезка. Рассматривая рис. 248, устанавливаем, что b,Bi - Одв ==АВ-(л; d-P, = vj = AD w, rfiD, AD biBi AB Так как A,d, = AD и Aib, = AB как противоположные стороны параллелограммов, то имеем аГ.Р, A,d, b,B, - A,by Это соотношение показывает, что ADB, - отрезок прямой. Из подобия треугольников A,d,D, и А,Ь,В, имеем - или - ri- = -лг и - А,В, ~ Л,6, ~ ЛВ ~ DB т. е. расстояния между концами скоростей пропорциональны расстояниям между соответствующими точками. § 100. Примеры на применение теоремы о скоростях точек плоской фигуры При решении примеров с помощью теоремы о скоростях точек плоской фигуры используют следствия этой теоремы. Обычно в таких случаях применяют графический метод, который требует построения схем в масштабе длин, а скоростей - в масштабе скоростей в их истинном направлении. Пример 62. По заданной скорости одной точки плоской фигуры построить годограф возможных скоростей другой точки этой фигуры. Решение. Пусть известна скорость точки Л, требуется определить возможные скорости точки В плоской фигуры (рис. 249). Про- ведем через точки А н В ось х и найдем проекцию Аа скорости Уд на эту ось. По первому следствию теоремы о скоростях точек плоской фигуры проекции скоростей точек Л и В на эту ось равны. Отложим по оси х от точки В проекцию ВЬ, равную по величине проекции Аа и совпадающую с ней по направлению. В точке b восставим перпендикуляр к оси jc. Только на этой прямой и может находиться конец скорости точки В. Эта прямая является годографом возможных скоростей точки В. Пример 63. Зная скорости ползунов А и в, определить скорость шарнира С механизма, изображенного на рис. 250 а, в указанном положении. Решение. Так как шарнир С соединяет стержни АС и ВС механизма, то точка С одновременно принадлежит каждому из Р„р 249. этих стержней. Поэтому проекция неизвестной скорости шарнира С на ось стержня АС равна проекции скорости ползуна А на эту ось и имеет такое же напра- 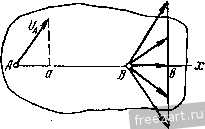 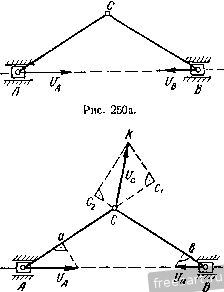 Рис. 2506. вление, а проекция скорости шарнира С на ось стержня ВС равна проекции скорости шарнира В на эту же ось (рис. 2506). 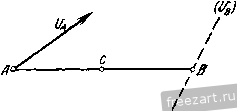 Рис. 251а. Находим проекцию Аа скорости Уд на ось АС и откладываем по этой оси из точки С отрезок Сс, = Аа. Аналогично находим проекцию ВЬ и откладываем отрезок СсВЬ. Затем восставляем в точках Cj и Сз перпендикуляры к направлениям этих осей. Точка К пересечения этих перпендикуляров определит собой конец скорости шарнира С, т. е. \ - СК- Пример 64. Зная модуль и направление скорости у^ одного конца отрезка и прямую, по которой направлена скорость Уд другого конца, определить модуль скорости Уд, а также модуль и направление скорости середины отрезка С (рис. 251а). Решение. Находим проекцию Аа заданной скорости Уд на ось, направленную по АВ (рис. 2516). Откладываем по этой оси от точки В проекцию S = Л а искомой скорости Уд и в точке b восставляем перпендикуляр к АВ. Точка Bi пересечения этого перпендикуляра с прямой, по которой направлена скорость Уд, является концом скорости точки В. Отрезок ВВу геометрически равен скорости Уд. Согласно второму следствию теоремы о скоростях точек плоской фигуры соединяем концы известных скоростей Уд и Уд и делим отрезок A,Bi пополам. Соединяя середину отрезка АВ с серединой отрезка А,В получаем отрезок СС геометрически равный скорости середины отрезка С. Таким образом, для определения скоростей всех точек отрезка необходимо знать модуль и направление скорости одной его точки и прямую, по j<OTOpoft направлена скорость другой точки. Пример 66. Зная скорости концов неизменяемого отрезка, определить скорость любой точки этого отрезка. Решение. Соединяя концы заданных скоростей Уд и Уд концов А и В отрезка АВ, получаем отрезок А,В.-геометрическое место концов скоростей точек этого отрезка (рис. 252а и б). Находим проекцию скорости какого-либо конца, например А на направление отрезка АВ, т. е. Аа.   С Рис. 2516.  Для графического определения скорости какой-либо точки отрезка, например D, откладываем от точки D вдоль отрезка АВ проекцию скорости этой точки Dd = Aa. 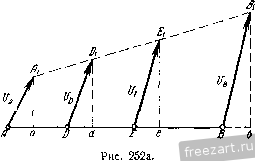  Рис. 2526. 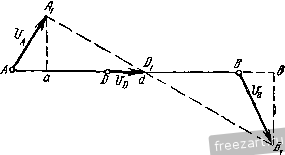 Рис. 253. В точке d восставляем перпендикуляр к направлению отрезка АВ, который продолжаем до пересечения с отрезком А-В. в точке Dy Соединяя точки D и Dy получаем отрезок DDy геометрически равный искомой скорости точки Z>, т. е. DD, = Уд. Скорость любой другой точки отрезка, например, точки Е, определяем аналогичным построением. Пример 66. Зная скорости концов отрезка, определить точку этого отрезка, скорость которой в данный момент времени направлена вдоль этого отрезка (рис. 253). Решение. Соединяя концы заданных скоростей точек А и В отрезка АВ. получаем отрезок А,В, - геометрическое место концов скоростей точек этого отрезка. Конец D, скорости искомой точки D, направленной вдоль АВ, должен быть в точке d пересечения отрезка А,В, с отрезком АВ. Начало скорости, т. е. точку D, определяем из равенства проекций скоростей: Dd = Аа = ВЬ. § 101. План скоростей Зависимость между скоростями точек плоской фигуры (99.1) позволяет ои,С1елять скорости точек этой фигуры простым и наглядным построением, называемым планом скоростей. Допус1им, что нам известны скорости точек А, В, С ш D плоской флгуры, изображенной на рис. 254, а. Отложим из произвольной точки О по направлению скоростей точек А, В, С, D отрезки Оа, Ob, Ос, Od, равные скоростям этих точек, и соединим точки а, Ь, с, d отрезками прямых (рис. 254, б).  А 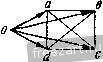 Рис. 254. Выполненное построение называется планом скоростей; отрезки Оа, Ob, Ос, Od называются лучами, а точки а, Ь, с, d - вершинами плана скоростей. Из треугольника аОЬ имеем ОЬ = Оа-\- аЬ или Vji+ab. По формуле (99.1) имеем (а) (б) Сопоставляя равенства (а) и (б), устанавливаем, что ab = \jQ, аналогично be = \qq\ cd = vo и т. д. Следовательно, каждый из отрезков, соединяющих вершины плана скоростей, геометрически равен вращательной скорости соответствующей точки фигуры вокруг другой точки как вокруг полюса. Поэтому имеем: аЬ=АВ-ш и аЬ±АВ, bc=zBC ш и be ± ВС, cd = CD .iu и cd±CD и т. д. Отсюда следует, что многоугольник abed подобен многоугольнику ABCD и повернут относительно последнего на ЭО в сторону вращения движущейся плоской фигуры. Построение плана скоростей Для построения плана скоростей точек плоской фигуры необходимо знать модуль и направление скорости одной из точек этой фигуры и прямую, по которой направлена скорость какой-либо другой точки фигуры. Допустим, что известны модуль и направление скорости точки А треугольной пластинки ABC, движущейся в плоскости чертежа, и прямая, по которой направлена скорость точки В , -.Jj gf этой пластинки (рис. 255, а). Требуется определить ско- рости точек В и С путем построения плана скоростей. Проведем из произвольной точки О отрезок Оа = Уд и прямую, параллельную прямой, по которой направлена скорость Уд {рис. 255, б). Известно, что отрезки, соединяющие вершины плана скоростей, перпендикулярны отрезкам, соединяющим соответствующие точки фигуры. Чтобы определить вершину Ъ плана скоростей, проведем из вершины а прямую, перпендикулярную АВ; точка пересечения ее <; прямой, по которой направлена скорость точки В, и будет вершиной Ь, а отрезок Ob определит скорость точки В, т. е. ОЬ = \д. Чтобы получить вершину с плана скоростей, следует провести из вершин а я b прямые, перпендикулярные сторонам треугольника АС и ВС. Точка пересечения этих прямых будет вершиной с, а отрезок Ос определит скорость точки С.   Рис. 255. Аналогичным построением можно определить скорость любой точки плоской фигуры, соединив ее с двумя точками, скорости которых уже известны. Рассмотрим, например, построение плана скоростей для точек А, В, С п D механизма, изображенного на рис. 256, а. Зная модуль и направление скорости Уд точки А и прямую, по которой направлена скорость точки В, строим план скоростей для шатуна АВ. Из произвольной точки О откладываем отрезок Оа, изображающий по модулю и направлению скорость Уд. После этого проводим а Рис. 256. из точки О прямую ОЬ. параллельную О^В, а из точки а - прямую аЬ, перпендикулярную АВ. Эти прямые продолжаем до их пересечения в точке Ь, являющейся вершиной плана скоростей. Отрезок ОЬ изображает по модулю и направлению скорость Уд. Для определения модуля и направления скорости точки С шатуна АВ делим отрезок аЬ в отношении АС: ВС, находим точку с и проводим луч Ос, определяющий собой модуль и направление скорости точки С. План скоростей для стержня CD строим на основе плана скоростей шатуна АВ. Проведем из точки О прямую Od, параллельную прямой, по которой направлена скорость точки D, т. е. прямую, перпендикулярную OjO, а из точки с прямую cd, перпендикулярную CD. Эти прямые продолжаем до их пересечения в точке d, являющейся вершиной плана скоростей. Отрезок Od изображает по модулю и направлению скорость Уд. Лучи Оа, ОЬ, Ос, Od (рис. 256, б) определяют модули и направления скоростей всех заданных точек плоского механизма. Остановимся на случае, когда заданная скорость точки плоской фигуры параллельна прямой, по которой направлена скорость другой точки этой фигуры. Для построения плана скоростей требуется знать модуль скорости второй точки. Например, если скорости точек А н В плоской фигуры перпендикулярны отрезку АВ (рис. 257, а) и известен только модуль ско- рости Уд, то определить положение вершины b плана скоростей невозможно, так как на плане скоростей перпендикуляр к АВ сливается с прямой, по которой, направлена скорость Уд (рис. 257, б). Необходимо знать модуль Уд, чтобы, отложив ОЬ == Уд, получить точку b плана скоростей. Определение скоростей остальных точек, например С, производится как и в предыдущих примерах: ас 1 АС, be J ВС.  Рис. 257. Пример 67. Определить путем построения плана скоростей скорости точек механизма, изображенного на рис. 258, а, в положении, когда ср=135, если угловая скорость ведущего кривошипа О^А равна (йод. Положение неподвижных точек О и О3 определяется расстояниями 1 /3 и /4. Решение. Механизм, изображенный на рис. 258, а, состоит из шарнирного четырехзвенника О^АВО^ к шатуну которого в точке С присоединено шарнирно звено CDE, соединяющее шатун АВ с балансиром O3D и шатуном EF. Механизм имеет три звена О-А, Оф и O3D, которые поворачиваются вокруг неподвижных центров 0 Oj и О3, три звена АВ, CDE и EF, совершающие плоское движение, и ползунок F, движущийся поступательно. Механизм служит для преобразования вращательного движения ведущего кривошипа О^А в поступательное движение ползунка F. Известны траектории, а следовательно, и прямые, по которым направлены скорости точек А, В, D, движущихся по окружностям, а также точки F, движущейся по оси направляющих. Изобразим механизм в выбранном масштабе и заданном положении (рис. 258, б). По заданной угловой скорости ведущего кривошипа вычисляем скорость точки А: Ул =<оо,А OiA. Скорость Уд перпендикулярна отрезку О^А. Для построения плана скоростей (рис. 258, в) выбираем масштаб скоростей и в этом масштабе откладываем луч Оа = Уд. Для определения скорости точки В из точки О плана скоростей проводим прямую, по которой направлена скорость Vg, перпендику- 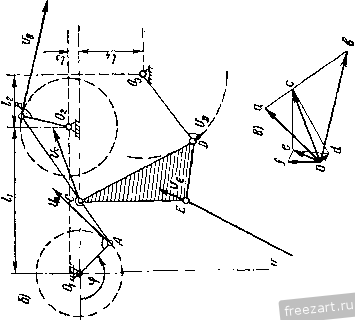 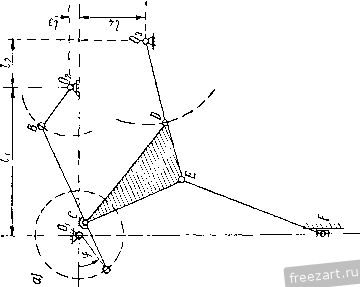 1 ... 24 25 26 27 28 29 30 ... 44 |
 |
 |