

|
|
|
Навигация
|
Главная » Мануалы водилу и. Парные сателлиты / и (рнс. б) вращаются вокруг осей, закрепленных Ега водиле Н, н находятся в сцеплении с колесами / и IV, движение которых через полуоси <3 и 4 передается задним колесам автомобиля. Для получения кинематической зависимости в передаче достаточно одного сателлита (/ и ), помещенного на водиле И- Однако для разгрузки осей 3 а 4 вводят второй сателлит, располагая его симметрично на противоположном конце водила Н. Вал / с шестерней 2 делает 600 об j мин, передаточное отновтение = 5. 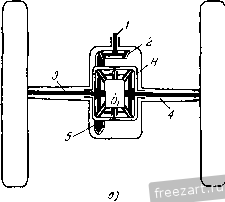 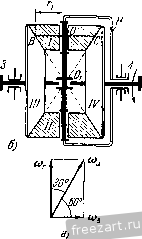 К задачам 7.11 и 7.12. Определить абсолютную и относительную угловые скорости сател литов и угловые скорости шестерен / и IV: а) при прямолинейном движении автомобиля, б) в случае, если правое заднее колесо, встретив препятствие, остановилось. Радиусы сателлитов / и U равны г, = 15 см, радиусы шестерен / и IV-г^=\ъуъ см. Решение. Обозначим угловую скорость колеса 5, равную угловой скорости водила, через 2. Тогда для конической пары 2 и 5 имеем: !: = :i, (1) 0)2 = 2 = 120 об j мин. Зная угловую скорость водила, применим к расчету угловых скоростей звеньев автомобильного дифференциала метод Виллиса. Дадим причем в формуле (3) взят знак минус, так как колеса / и IV (при остановленном водиле) вращаются в противоположных направлениях. Решая уравнения (2) и (3) относительно й и (о, находи.м: = ( з + 4). (4) = {;;( з- 4)- (5) Пользуясь этими форму.1ами, найдем ответы. а) При прямолииейиом движении угловые скорости колес равны Шз = ш4 и, следовательно, из (4) имеем: W3 = u)j = g=120 об/мин; из (5) находим: ш = 0. Сателлиты не вращаются относительно водила И. б) В случае остановки право10 заднего колеса автомобиля ш^О. Тогда из (4) находим: шз=:22==240 об/мин. Относите.чьиая угловая скорость сателлита из (5) равна U) = u)3= 120 ]/3 об/мин. Абсолютная угловая скорость сателлита определится из рис. в, где ш^ = ш=120 1/з об/мин, <о^ = 2=120 об/мин: ш„ = /со +Й^ = 240 об/мин. Задача 7.12. Для автомобильного дифференциала, рассмотренного в предыдущей задаче, определить угловую скорость водила Q и мысленно основанию механизма (рис. <5) враи1ение, противоиоложнос врагг1ению водила и равное ему по величине. Тогда водило станет неподвижным, а угловые скорости шестерен /и IV будут равны а -а 4>i - Q. Угловую скорость сателлигг относительно водила обозначи.м через ш. Тогда для каждой пары колес с неподвижными осями можно записать равенства: Угловые скорости шестерен III п IV (рис. б) будут: Тогда из формулы (4) предыдущей задачи находим угловую cico-рость водила 2 = Y(< з + = {- i-г = I = р = 2 а из формулы (5) - отиосительнукт у!ЛОвую скорость сателлитов Для приобретения навыков в решении задач на сложение вращений вокруг пересекающихся осей рекомендуется решить следующие задачи из Сборника задач по теоретической механике И. В. Мещерского, издания 1950 г. и более поздних лет: 611, 612, 614, 615, 617, 618, 622, 627, 630, 632. § 3. Общий случай движения твердого тела. Сложение поступательных и вращательных движений 1 °. Скорости и ускорения точек твердого тела в о б ит ем случае д в it жени я. Уравнения движения твердою тела в общем случае движения записываются в виде -vo=/i(o. >о=/до, zo=m\ \ Здесь xq, Уо, zq - координаты произвольной точки твердого тела, выбранной за полюс; 6, 9, О - углы Эйлера: угол прецессии, угол чистою, или собстветшого, вращеЕшя и угол нутации, определяющие поворот твердого тела вокруг полюса. Скорость любой точки твердого тела в общем случае движения опреде.тяется формулой v = Vor<Xr (2 0 относительную угловую скорость сателлитов ш, если при повороте задние колеса автомобиля описывают на земле дуги радиусов Pi = 20 м и p.j=18 . , причем скорость центра тяжести автомобиля zi = 38 м/сек. Радиус заднего колеса /? = 0,б м. Рещение. Скоросги центров задних колес автомобиля определятся но формулам р1 = 40 м/сек, г\ = -.р,= 3б м/сек. где и - скорость любой точки твердого тела; Vq - скорость полюса; <й-мгновенная угловая скорость твердого тела; г, - радиус-вектор, проведенный из полюса в точку, скорость которой подлежит определению. Ускорение любой точки твердого тела в общем случае движе1щя определяется формулой , = ,0 + £Хг1 + <йХ (*йХг,)- (3*) Здесь W - искомое ускорение точки; Wq - ускорение полюса; е - мгновенное угловое ускорение твердого тела. Задача 7.13. Центр тяжести ракеты движется со скоростью и ракета одновременно вращается вокруг своей оси с угловой скоростью (и (рис. а). Две точки А w В расположены на одном диаметре, перпендикулярном к оси, соответственно на расстояниях и 4 от последней. Какому условию должны удовлетворять расстояния /, и 7j, если известно, что скорости точек А и В взаимно перпендикулярны? Решение. Задача может быть решена двумя способами: анали-чически и графически. Первый способ. Движение ракеты соответствует общему случаю движения твердого тела, причем винтовая ось совпадает с осью ракеты. В общем случае движения твердого тела скорость любой его точки определяется формулой (2*-): 1 = 10 + **ХГ1, где V - скорость любой точки твердого тела; Vq - скорость точки выбранной за полюс; ш - угловая скорость твердого тела; ri - радиус-вектор, проведенный из полюса в точку, скорость которой определяется. Принимая произвольную течку О на оси ракеты за полюс, запишем скорости течек А и В: где Г1 и Г2 - радиусы-векторы точек А и В, проведенные из полюса О. Скорости Сд и по условию взаимно перпендикулярны. Условие перпендикулярности векторов - равенство нулю их скалярного произведения: фд.фв = 0. Подставляя в это равенство значения скоростей, получим: (z -h X/-.)-( o + X/--2) = 0. Раскрывая скобки, находим: 0 + (oXri) -v.-l-- ( Xr.) -г ( X/-i) i<i>Xrd = 0. (1) так как первый сомножитель в скобке перпендикулярен к вектору ш, а второй сомножитель по условию параллелен ш. Аналогично устанавливаем, что и третье слагаемое о-( X / а) = 0. Рассмотрим последнее слагаемое из (I). Имеем ((О X / !)( X = (cur, sin а) (u)r.3 sin cos 180° = - и)/,, так как векторные произведения (юХ!) и (шХО параллельны 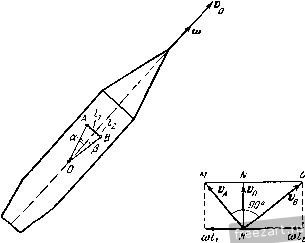 К задаче 7ЛЗ. и направлены в противоположные стороны. Внося значения слагаемых в равенство (1), находим: откуда окончательно имеем: Это и есть условие, которому должны удовлетворять отрезки и /j. Второй способ. Графическое решение этой задачи представлено на рис. б, где дано сложение скоростей точек А и Б на плоскости, перпендикулярной к АБ. Скорость фд складывается из взаимно перпендикулярных соста-вляюших, равных по модулю к о)/,; скорость Vg аналогично получается из составляющих, модули которых и cu4, причем w/, и си/, направлены в противоположные стороны, а скорости 1) и Vg взаимно перпепдикулярпы. Тогда из прямоугольного треугольника MKL с высотой KN находим, что KN = NM NL ил и vl = cu/j. шД, 2°. Сложение поступательных и вращательных движений твердого тела. Рассмотрим движение твердого тела, участвующего в нескольких вращательных движениях вокруг произвольно расположенных мгновенных осей и одновременно в нескольких поступательных дг!.ижсниях. Вращательное движение тнердого тела характеризуется мгповешюй осью и углоной скоростью, направленной по мгнонетюй оси. Вектор угловой скорости можно переносить в любую точку вдоль мгновенной оси, следователыю, угловая скорость есть скользящий нектор. Поступательное днижепие твердого тела мож1Ю охарактеризовать скоростью. Скорость поступательного движения тнердого тела можно рассматривать как результат действия пары вращений. Скорость поступательного движения твердого тела есть свободный вектор. При параллельном переносе вектора угловой скорости добавляется в точке приведения поступательная скорость Ф = гХй)> (1*) где г - радиус-вектор, прсведеипый из точки приведения в течку нриложештя вектора угловой скорости. Таким образом, ныбирая произвольную точку за полюс, мож1Ю привести все угловые скорости к этой точке и, сложив, получить результирующую угловую скорость =i: .. (2*) Поступательные скорости, как непосредственно заданные, так и возникающие при приведении угловых скоростей к центру приведения, складываются и дают результирующую [юступательпую скорость т 0=1] (3*) Таким образом, любая совокупность вращательных и поступательных днижений твердого тела может быть заменена одштм вращением с угловой скоростью (О вокруг мгновенной оси, проходящей через центр приведения, и одним ностунатсльпым движештем со скоростью v. Частные случаи сложения нраитений и поступательных движений твердого тела: 1. Если с) = 0, Vfi = 0, то тело находится в мгновенном покое. 2. Если (Л О, Vfi = 0, то тело враитастся вокруг мгновенной оси. 3. Если (0 = 0, 1 о О, то тело движется мгиовенно-постунательио. 4. Если (афО, Vfi-A и то тело враитается вокруг мгновенной оси, параллельной и отстоявгей на расстоянии vJm от мгновенной оси, проходящей через центр приведения. Эта мгновенная ось лежит в плоскости, перпендикулярной к скорости 5. Если (О О, ©о 9 О и г\ не перпендикулярна к (о, то тело соверщает мгнове1нгое винтовое движерие. В этом случае супгествует мгновенная ви1гговая ось - геометрическое место точек, скорости которых равны между собой и направлены вдоль мгновегиюй оси. Кинематическим вннто.м называется совокупность угловой скорости и посгунагельной скорости, напраиленных по одно!! п^)ямой. Сложение в р а пт е н и й и п о с т у и а т с л ь и ы х д в и ж е н и ft твердого тела ре к оме fi дуется производить в следу ю-нт е м п о р я д к е: 1) выбрать оси декартовых координат; 2) взять в начале координат, точке О, центр приведерия; 3) вычислить проекции результирующего вектора угловой скорости; 4) определить модуль результирующего вектора угловой скорости и его направляющие косинусы; 5) найти проекции рс:1ультнруюн1ей поступательной скорости; 6) определить модуль результирующей поступательной скорости и се направляющие косинусы; 7) установить, к какому из пяти часпгых случаев приводится результирующее движение; 8) если движение приводится к вращению вокруг мгновенной оси, то ее уравнергие находится по формуле О^ -J-2Mj Чу - г<Ол; + -У' г г - Л->>у+У'х /4*4 <х у где X, у, Z - текупгие коордир|аты мгновенной оси; Шд, w, и v, Vy, г; - соответственно проекции результируюитих угловой скорости и поступательной скорости на оси координат; 9) если движение приводится к винтовому движению, то уравнение винтовой оси находится по той же формуле (4*). Наименьщее значение резу.-ьтирующей ностунателыюй скорости, равное проекции поступательной скорости на мгпове1И1ую ось врг-щения, определяется по формуле 10) определить параметр кинематического винта, равный отношению минимальной поступательной скорости via к результирующей угловой скорости твердого тела, по формуле (6*) 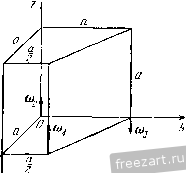 Как следует из вышеизложенного, существует аналогия между приведением пространственной системы сил к простейшему виду и сложением поступательных и вращательных движений твердого тела. При этом роль сил играют угловые скорости, а роль моментов присоединенных пар - 1юсту-нательные скорости твердого тела. Задача 7.14. Тело, размеры которого указаны на рисунке, участвует в нескольких вращениях с угловыми скоростями (0, Ш.2, Щ И 1. Привести движе1ше тела к простейшему виду, если X 1С0, Jl = J4 = 2cU, U).2 = 0)3 = 0). К заллче 7.14. Р е ш е н и е. Координатные оси изображены на рисушсе. Примем за центр приведения точку О. Совокупность зада1шых угловых скоростей приводится в общем случае к скорости v и угловой скорости Определим проекции результирующей угловой скорости: < , = 0, % = 0, 0) = - О), - (Uj - - 0), 0) = - 2о) - О) -[- О) 2о) = о, следовательно, вектор равен нулю: o = T/< i + . + l = 0. Проекции результирующей скорости на оси координат Vx, Vy, найдем аналогично проекциям главных моментов сил, рассматривая (О), (0-2, Шз н 4 как силы: а .v = 4 -y- Шз а = -к--(ЧД = о. Vy = - ю^-а - Шз а = - 2т -j- 2т = О, следовательно, Итак, 0 = 0 и 0 = 0, т. е. тело будет находиться в мгновенном покое. Задача 7.15. Твердое тело в форме куба ,со стороной а участвует во вращений с угловыми скоростями CU, = = = (О3 = = (U и (Oj = ш^-:шуч. Размеры тела и направление угловых скоростей указаны на рис. а. Привести движение тела к простейшему виду. Решение. Примем за центр приведения точку О. Направим оси х, у, z вдоль ребер куба. Определим проекции результирующей угловой скорости: = (U.J - (Uj cos 45°, (0 = - О), - ( 4-1- ( 80545°-}- -- ( б COS 45°, (u = (u3 - ( и cos 45°. Подставив величины угловых скоростей, будем иметь: (u = (u = (u = 0.
к задаче 7.15. Следовательно, в результирующем движении вращения не будет. Определим проекции результирующей поступательной скорости: t)j(= ( за - (Ода cos 45° - (ua sin 45°, t) = - ( з - з^ cos 45° -\- (ua cos 45°, = - (О-зД - (ua -f (ОиД cos 45° -j- (ОдД sin 45°. Подставив известные значе1шя величин, получим: tij, = - ш, Vy = - та, v = 0. Тогда модуль поступательной скорости равен V = Vv%-[-vy-vl = ша У 2. Таким образом, движение те.ча будет мгновенно-ноступательным со скоростью ti = (ualA2, направленной, как показано на рис. б. Полезно отметить, что результирующее мгновенно-поступательное движение получается из сложешгя одних вращений. Задача 7.16. Тело А вращается вокруг оси / с угловой скоростью Ш|, тело В независимо от него вращается вокруг оси с угловой скоростью 2 = 2(0,. Ось перпендикулярна к оси / и находится от нее на расстоянии а. Какое движение совершает тело А по отношению к телу В? Решение. Графический метод. Дадим телу D дополнительное вращение с угловой скоростью - (о. тогда тело В будет неподвижно. Движе1ще тела А по отношеншо к В будет складываться 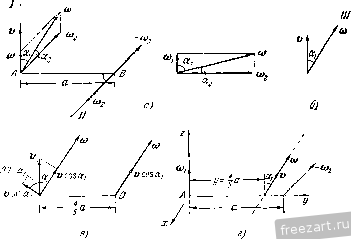 К задаче 7.16. из врангепия вокруг оси I с угловой скоростью (о, и из вращения вокруг оси с угловой скоростью - (Оо. Приведем вектор - ш, к точке А, тогда в этой точке, кроме вектора - (о., следует приложить и скорость и = г X где г = ПА. Этот вектор v будет наирав.тен но оси / и равен но модулю ti = (u.j а = Чшуй. Складывая векторные углощ.ю скорости (Oi и - (о.д, приложенные в точке А, получим суммарный вектор о), нанравленныН под углом а, к оси / и под углом а.2 к оси , причем - 2 - о., - 2 , - 2 1 ... 47 48 49 50 51 |
 |
 |