

|
|
|
Навигация
|
Главная » Мануалы должна отличаться не более чем на +2% от величины силы Т'ср, полученной по формуле где Л^ - индикаторная мощность двигателя, полученная по тепловому расчету, в л. с; п - число оборотов вала двигателя в минуту; 9 - коэффициент полноты индикаторной диаграммы, принятый в тепловом расчете. Коэффициент 9 учитывается в том случае, если определение Т^ произведено по теоретической диаграмме без учета ее округления. , g Моменты на промежуточных шейках отличаются от полного момента как по характеру изменения по углу поворота вала, так и по величине. При этом наибольшее (мгновенное) значение крутящего момента в многоцилиндровых двигателях обычно получается не на первой шейке вала О-J, а на одной из промежуточных шеек вала. По таблицам, составленным по формам 1 и 2, определяют условия нагружения любого кривошипа при произвольном положении коленчатого вала. § 5. ВЫБОР ОПАСНЫХ ПОЛОЖЕНИЙ ДЛЯ РАСЧЕТА КОЛЕНЧАТОГО ВАЛА НА ПРОЧНОСТЬ Нагрузка коленчатого вала обусловлена величинами сил Т, Z и набегающего крутящего момента Г. Наибольшее значение сил Т и Z не совпадают ни между собой, ни с наибольшим значением набегающего момента. По комбинациям же Г, Z и УТ, при которых только одна величина имеет максимум, в большинстве случаев нельзя установить, какая же из них является наиболее опасной для коленчатого вала. Поэтому наиболее напряженное колено можно выявить следующим образом. Рассмотрим сначала наиболее часто встречающийся случай, когда размеры всех колен одинаковы. Для первого колена вала вписывают в таблицу, составленную по форме 3, те сочетания нагрузок, при которых силы Т или Z или момент У.Т имеют максимум. Учитывая, что наибольшее напряжение может быть не при максимуме сил Т или Z, а при каком-то другом положении, например, при положении, соответствующем максимуму их равнодействующей форму 3 дополняют силами и моментами Т, Z, УТ и Q, при которых Q максимально. Если при просмотре таблиц, составленных по формам 1 и 2, возникает необходимость проверить какое-либо другое сочетание сил и набегающего крутящего момента, при котором ни одна из них не имеет максимума, то такое сочетание также вписывают в таблицу. Все величины вписывают в таблицу с их знаками. Затем вписывают в таблицу сочетания сил Т, Z, Q и момента для остальных колен вала. Если при этом видно, что какое-нибудь из сочетаний менее опасно, чем уже имеюищеся в таблице, то его опускают. Угол а, поворота кривошипа считают от в. м. т. (начало впуска в первом цилиндре). Таким образом, таблица, составленная по форме 3, представляет сводку сочетания сил и моментов, которые могут вызвать в валу наибольшие напряжения. После этого, внимательно просматривая таблицу, вычеркивают из нее все менее опасные комбинации. По остающимся трем-пятк комбинациям производят расчет коленчатого вала на прочность, который позволяет вы- явить наиболее опасную комбинацию нагрузки для наиболее нагруженного колена вала. ФОРМА 3 Наиболее опасные сочетания сил, действующих на колено вала
При определении напряжений в валах быстроходных двигателей учитываются неучитываемые при выборе опасного положения силы С„, и С^р, § 6. ВЕКТОРНАЯ ДИАГРАММА сил, ДЕЙСТВУЮЩИХ НА КРИВОШИПНУЮ ШЕЙКУ КОЛЕНЧАТОГО ВАЛА Векторная диаграмма дает величину и направление силы, действующей при каждом положении кривошипа на его шейку. Получив эти силы, находят максимальное и среднее значение их за полный цикл. Сама же векторная
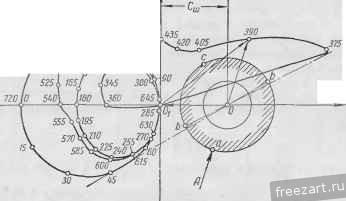 1 кг/см Фиг. 16. Векторная диаграмма сил, действующих на кривошипную шейку четырехтактного двигателя. диаграмма представляет цешюстъ в том отношении, что по ней наглядно можно установить картину нагруженности шейки, позволяющую найти наименее нагруженную часть шейки. В этом возникает необходимость при выборе места сверления в шейке канала для подвода масла. Векторную диаграмму удобно строить без учета центробежной силы от вращательно двигающейся части шатуна, постоянной по величине и направлению, учитывая ее после соответствующим сдвигом начала координат. Для построения проводим оси координат (фиг. 16). Вертикальная ось является осью сил Т. Направление оси вверх от начала координат примем за положительное. Горизонтальная ось является осью сил Z. Направление 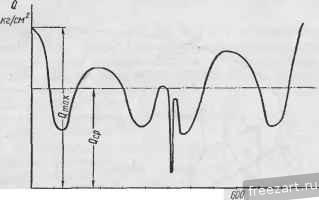 ОСИ вправо примем за положительное. Для каждого положения кривошипа, начиная от 0° и до конца цикла, берем из таблицы, составленной по форме 1, силы Г и Z и откладываем их на осях в выбранном масштабе с учетом знака. Из концов векторов, отложенных на осях, восставляем перпендикуляры. Каждую точку пересечения этих перпендикуляров отмечаем соответствующим углом поворота кривошипа. Полученные точки являются концами векторов, представляющих по величине и направлению равнодействующие силы для каждого угла поворота кривошипа. На фиг. 16 для примера построен вектор, соответствующий углу поворота кривошипа, равному 390°. Построенные точки соединяем последовательно между собой плавной кривой, которая образует некоторый замкнутый контур. Затем необходимо учесть влияние центробежной силы С^. Будучи отрицательной и действуя по ocnZ, она уменьшает положительные силы Z и увеличивает отрицательные Z на одну и ту же величину, равную С„/. Следовательно, сила может быть учтена путем переноса начала координат в положительном направлении по оси Z из точки О, в точку О, расположенную от точки О, на расстоянии, представляющем в принятом масштабе величину силы С^. Векторы, соединяющие новое начало координат с точками на контуре векторной диаграммы, выражают по величине и направлению силы, действующие на кривошипную шейку вала с учетом центробежных сил от части шатуна при данных углах поворота кривошипа. Соответствующая каждому вектору сила приложена к поверхности шейки вне вектора в точке пересечения окружности шейки с линией действия вектора. Для угла поворота кривошипа, равного 390°, например, сила Л, обозначенная стрелкой, приложена в точке а. Таким образом, форма векторной диаграммы показывает, что наименее нагруженной частью шейки является дуга bcb. Наибольшая величина силы, действующей на кривошипную шейку, может быть определена непосредственно на векторной диаграмме. Для получения же средней силы следует предварительно построить развернутую диаграмму сил, действующих на кривошипную шейку. Для этого на оси абсцисс (фиг. 17) нужно отложить для каждого положения кривошипа угол (а -f р), а на проведенных из этих точек ординатах - величину векторов (от точки О), соответствующих углам а. Так как величина угла р незначительна, для упрощения построения диаграммы ею обычно пренебрегают. При построении этой диаграммы все векторы считаются положительными. Концы отложенных векторов соединяют плавной кривой, ординаты которой представляют собой в масштабе силы Q, действующие на шейку. После этого определяют среднюю силу Qp, действующую на шейку. При определении (по величине) максимальной и средней сил, максимального и среднего давлений на кривошипную шейку вала необходимо не забывать, что векторная диаграмма, так же как и развернутая диаграмма, построена для удельных сил.. Следовательно, для получения полных сил Q нужно величину удельных сил умножить на площадь поршня в см. . )* ш 180 240 300 360 т т 17. Развернутая диаграмма сил, на кривошипную шейку вала. 660 720 <х° действующих § 7. ВЕКТОРНАЯ ДИАГРАММА СИЛ, ДЕЙСТВУЮЩИХ НА КРИВОШИПНЫЙ ПОДШИПНИК ШАТУНА Силы, действующие на кривошипный подшипник шатуна, по величине равны силам, действующим на кривошипную шейку, но противоположны по направлению. Величина этих сил после построения векторной диаграммы сил, действующих на кривошипную шейку, известна, и остается только правильно расположить их относительно осей координат, неподвижных относительно шатуна. Эту задачу проще всего решить графически на основании следующих рассуждений. При повороте кривошипа, а следовательно, и кривошипной шейки на угол а подшипник шатуна поворачивается относительно шейки в противоположном направлении на угол а -f р. Следо- 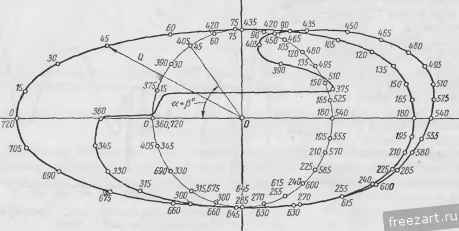 Фиг. 18. Векторная диаграмма сил, действующих на кривошипный подшипник. вательно, для того чтобы расположить вектор, действующий при этом ново- роте кривошипа относительно осей, соединенных с подшипником шатуна, вектор надо повернуть ъ направлении, противоположном вращению шейки, на угол (а -Ь ) и направить в противоположную сторону. Для получения векторной диаграммы сил, действующих на кривошипный подшипник, на листе кальки проводят ось шатуна, отмечают на ней центры поршневой и кривошипной головок и из центра кривошипной головки проводят ось, перпендикулярную оси шатуна. Затем из центра кривошипной головки проводят окружность произвольного радиуса. У точки пересечения окружности с осью шатуна (между осью пальца и кривошипной шейкой) ставят соответствующие цифры 0; 360 и 720 для четырехтактного двигателя или О и 360° - для двухтактного двигателя. Далее, как показано на фиг. 18, откладывают на окружности величину дуги (а -}- Р) в направлении вращения кривошипа от начальной точки. Концы дуг обозначают величиной угла а. Таким образом, на окружности получается шкала с отметками, соответствующими всем углам поворота кривошипа от О до 720°для четырехтактного двигателя или от О до 360° для двухтактного. После этого кальку следует наложить на векторную диаграмму сил, действующих на кривошипную шейку так, чтобы при совмещенных началах координат ось шатуна совпала с осью Z и центр пальца расположился на ее положительном направлении. При этом положении, когда 0° шкалы совмещается с положительным направлением оси Z, отмечают на кальке точку конца вектора, соответствующего данному положению кривошипа. Далее, вращая кальку в направлении, .противоположном движению кривошипа, совмещают с положительным § 8. ВЕКТОРНАЯ ДИАГРАММА СИЛ, ДЕЙСТВУЮЩИХ НА КОРЕННУЮ ШЕЙКУ КОЛЕНЧАТОГО ВАЛА Коренная шейка вала, находящаяся между /-м и / + 1 цилиндрами, нагружена реакциями от обоих колен вала. При этом предполагается, что коленчатый вал разрезан по серединам опор плоскостями, перпендикулярными оси вала так, что каждое колено вала представляет балку на двух опорах. ДХля выяснения величины реакций, действующих на коренную шейку, рассмотрим, условия равновесия части коленчатого вала, соответствующей цилиндру i. Примем, согласно фиг. 19, что в середине кривошипной шейки на вал действуют силы Z и С,. Тогда величины реакций определятся из следующих выражений:
(23) 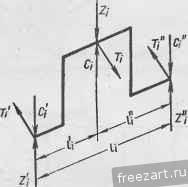 Фиг. 19. Схема нагружения колена силами. Колено цилиндра, расположенного ближе к свободному концу вала, нагружено силами Z/+i, и реакции которых равны: 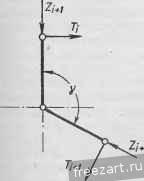 Z;+i =--- / Z , T Z/-f-i = li+\ t-f-l - 1 T, , , l: С (24) Фиг. 20. Схема для определения нагрузки на коренную шейку коленчатого вала. Для упрощения подсчетов примем, что реакции имеют те же знаки, что и силы. В дальнейшем это допущение будет учтено при изображении шейки с коленами на векторной диаграмме. Вследствие того, что кривошипы вала расположены под углом If (фиг. 20), который отсчитывают от плоскости кривошипа / цилиндра до плоскости кривошипа / -Ь 1 цилиндра по часовой стрелке, линии направлением оси Z последовательно все деления шкалы и при каждом поло* жении отмечают на кальке положение конца соответствующего вектора. Нанесенные таким образом на кальку точки обозначают соответствующей величиной угла а. Полученные точки последовательно соединяют плавной кривой. На фиг. 18 показана векторная диаграмма сил, действующих на кривошипный подшипник шатуна четырехтактного двигателя с учетом инерционных сил. Наименее нагруженная часть кривошипного подшипника находится на векторной диаграмме там, куда направлены из центра наименьшие по величине векторы. действия реакции от сил T и Г/ ь Z, и Z/ i, С,- и Cj i в общем случае не совпадают между собой. Исключением является случай, когда [ = 0; 90; 180; 270° и т. д. Поэтому сложение реакций производят геометрически с учетом угла между кривошипами. Через центр кривошипной шейки проводят оси координат так, чтобы ось, по которой отложена сила Z, совпадала с осью силы Z цилиндра /, а ось, на которой отложена сила Т, была параллельна оси Т того же цилиндра. Принимают положительным направление силы Z вниз от начала координат, а силы Т вправо от начала координат. Тогда, согласно фиг. 20 сумма проекций реакций Zl, Т\, Zi\ и Ti + \ на эти оси имеет следующие выражения: Zi (, +!) = -Ь Zj+1 .cos Y + tli sin Y; Ti (/+1) = Ti -h rlVi cos Y - Z/ i sin Y, в эти выражения величины Zj, Г1, Zjli, cos-у и sin у подставляют с их знаками. Таким же образом для центробежных сил получим Zc (£+i) = Ci -Ь Clf 1 COSY, Tc-{i-i) = - Cj+i sin Подсчеты величин Zi-ai) и для различных углов поворота кривошипов удобно производить в виде таблицы, например, по форме 4. ФОРМА 4 Силы, действующие на коренные шейки вала
Таблицу составляют по углу поворота кривошипа первого цилиндра от начала цикла. Для выявления одновременно действующих сил при каждом положении коленчатого вала указывают положения кривошипов /-го и i -Ь 1 цилиндров от начала цикла, вписывают значения сил Г и Z для каждого цилиндра при указанных положениях их кривошипов. Затем подсчитывают величины Z;, Т;, Tlu Ziu T i sini; Tl+i cosi; Z-+i cosy и Z;+,sinY. Первые величины записывают в таблицу с их знаками, а последнюю Zr+i sin Y с обратным знаком. Произведя алгебраическое сложение этих величин, находят T/ (i i) и Z/ (i--i). Если угол Y равен 0°; 90°; 180° или 270°, то составление таблицы значительно упрощается. Определив значения Z; (£ i) и Ti-a-i) для всех положений коленчатого вала, строят векторную диаграмму. Для этого проводят оси, на которых откладывают силы Z и Т. Ось силы Z совмещают с осью кривошипа /-го цилиндра, ось силы Т располагают перпендикулярно ей. Положительными считаются направления у оси силы Z вниз, а у оси силы Т вправо. Векторы для каждого положения коленчатого вала строят так же, как и при построении векторной диаграммы для кривошипной шейки. Полученная векторная диаграмма не учитывает действия центробежных сил. Для их учета поступают аналогично тому, как при построении векторной диаграммы сил, действующих на кривошипную шейку. По осям сил Z и Т откладывают векторы, равные Zc. и-\-\) и Т c-(i-i), но с обратными знаками. Из концов этих векторов проводят перпендикуляры. Точка пересечения их представляет начало координат векторной диаграммы сил, действующих на коренную шейку вала с учетом центробежных сил. Далее располагаем диаграмму относительно коренной шейки. При построении предполагалось, что ось силы Z совпадает с осью кривошипа /-го цилиндра, направление этой оси такое же, как у оси силы Z (i -f 1)-го цилиндра. Следовательно, новое начало координат нужно было бы совместить с центром коренной шейки, ось кривошипа i-ro цилиндра направить вверх по оси Z, центр кривошипной шейки расположить над началом координат, а ось кривошипа цилиндра / + 1 и центр его кривошипной шейки изобразить под углом 7. Учитывая то, что при построении диаграммы реакции принимались со знаками сил, такое изображение шейки с кривошипами не будет соответствовать действительности. Для получения правильного расположения шейки относительно диаграммы намеченное изображение шейки с кривошипами нужно повернуть относительно начала координат на 180° и в таком виде зафиксировать на векторной диаграмме. Для примера на фиг. 13 показано взаимное расположение кривошипов коленчатого вала шестицилиндрового четырехтактного двигателя с воспламенением от сжатия, а на фиг. 21 изображена векторная диаграмма, построенная для шейки 6-5, и дан эскиз шейки и кривошипов. Точкой О, обозначено начало координат без учета центробежных сил, а точкой О с учетом их. Для угла 135° показан вектор, характеризующий величину и направление равнодействующей реакций, действующих на шейку. Развернутую диа- 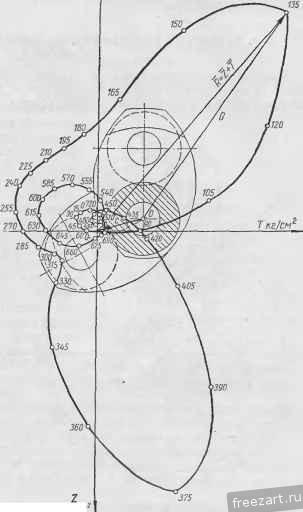 Фиг. 21. Векторная диаграмма сил, действующих на коренную шейку 6-5 шестицилиндрОвого четырехтактного двигателя. Грамму, служащую для определения Q О-ср строят таким же образом, как и для кривошипной шейки с той лишь разницей, что по оси абсцисс откладывают углы а. Кроме рассмотренного способа, векторную диаграмму поршневой шейки можно также построить и графически с помощью диаграммы сил, действующих на кривошипную головку. § 9. ВЕКТОРНАЯ ДИАГРАММА СИЛ, ДЕЙСТВУЮЩИХ НА КОРЕННОЙ ПОДШИПНИК Векторную диаграмму сил, действующих на коренной подшипник, наиболее просто построить, имея уже векторную диаграмму сил, действующих на коренную шейку. Построение производится так же, как и при построении диаграммы сил, действующих на кривошипный подшипник шатуна. На листе кальки для ориентации изображают контур коренного подшипника. Из центра подшипника проводят вертикальную ось силы Z и окружность произвольного радиуса. На оси силы Z над центром подшипника указывают центр кривошипной шейки 1-то колена, считая, что оно находится в нулевом положении от начала цикла. У точки пересечения окружности с осью силы Z между центром подшипника и центром кривошипной шейки записывают угол поворота вала, при котором г-й кривошип находится в нулевом положении от начала цикла, т. е. над осью подшипника. Далее дугу окружности делят на равные части, по величине соответствующие принятому углу Да между двумя последовательными положениями вала. Полученные точки обозначают углами поворота коленчатого вала, отмечая их последовательно по окружности в направлении вращения вала в пределах полного цикла. После этого лист кальки со шкалой накладывают на векторную диаграмму коренной шейки так, чтобы центр подшипника совпал с началом координат, оси силы Z совместились, а центры кривошипных шеек /-го колена на кальке и на векторной диаграмме расположились бы на оси силы Z с разных сторон от центра подшипника. При таком положении кальки точка шкалы, отмеченная углом поворота вала, при котором /-й кривошип находится в начальном положении, совпадает с осью силы Z. Точку векторной 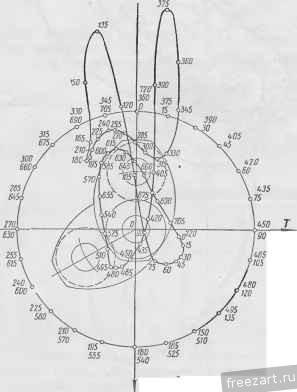 7 /сг/ш' Фиг. 22 Векторная диаграмма сил, действующих на коренной подшипник 6-5 шестицилиндрового четырехтактного двигателя. 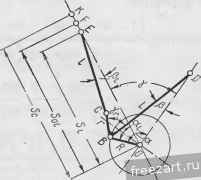 Фиг. 23. Схема кривошипно-шатун-ного механизма V-образного двигателя с прицепным шатуном. § 10. КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ С ПРИЦЕПНЫМ ШАТУНОМ V-ОБРАЗНОГО ДВИГАТЕЛЯ Двигатели с V-образным расположением цилиндров делятся по конструкции соединения шатунов с кривошипной шейкой коленчатого вала на три группы. Одну из них составляют двигатели, у которых это сочленение осуществляется при помощи главного и прицепного шатунов, другую - двигатели, имеющие вильчатый и центральный шатуны, и третью - двигатели с одинаковыми шатунами, расположенными рядом на общей кривошипной шейке вала. Первая конструкция характеризуется специфической кинематикой и динамикой кривошип но-шату иного механизма. Для второй и третьей конструкций кинематика и динамика кривошип но-шату иного механизма каждого ряда цилиндров такая же, как и у однорядного двигателя. Отличительными являются лишь условия нагрузки коленчатого вала, а в двигателях с вильчатым и центральным шатунами также и условия нагрузки шатунных подшипников. Поэтому представляет интерес выяснить особенности кривошипно-шатунного механизма с прицепным шатуном, а также рассмотреть силы, действующие в этом механизме. В кривошип но-шату ином механизме с прицепным шатуном шатун одного из цилиндров шарнирно соединен непосредственно с шейкой кривошипа. Этот шатун и соответствующий ему цилиндр называют главными. Шатуны другого цилиндра шарнирно соединены с главным шатуном посредством пальца, расположенного на кривошипной головке главного шатуна. Такой шатун называется прицепным, а соответствуюнщй ему цилиндр - боковым. На фиг. 23 показана схема кривошип но-шату иного механизма с прицепным шатуном. Используя работы И. Ш. Неймана для общего случая, когда угол 1 между осями цилиндров и угол между осью главного шатуна и прямой, соединяющей центр кривошипной шейки с центром пальца прицепного шатуна, не равны между собой, перемещение поршня в боковом цилиндре определим по формуле Sxj = Si, где Sp, - расстояние от оси коленчатого вала до оси поршневого пальца при положении поршня в в. м. т.; S - расстояние от оси коленчатого вала до оси пальца при угле поворота кривошипа на угол от оси бокового цилиндра. После подстановки величины получим i=Si- l/?cosa + rcos(P -)-f/cospl, (25) диаграммы, соответствующую этому углу, отмечают на кальке. Затем, поворачивая кальку в направлении, противоположном вращению вала до следующего деления шкалы, отмечают на ней точку, соответствующую этому углу, и т. д. Полученная векторная диаграмма сил, действующих на коренной подшипник, уже правильно расположена относительно контура подшипника (фиг. 22). где R - радиус кривошипа; / - длина прицепного шатуна; г - расстояние от оси пальца прицепного шатуна до оси кривошипной головки главного шатуна; ф-разность между углами и 7 Р = Т/ -Т- Приближенное выражение 5 с точностью до гармоники второго порядка: = A,-RlE cos (а^ -Ь Ф) 4- 0,25F cos (2<х, - 6)J, (26) где вспомогательные углы Ф и 6 и коэффициенты Е, F и определяются по формулам: Ф = arctg
= arctg X cos ф siny - р2 COS ф + COS 2ф^ sin 27 --X-jl cosфcos7-f (P2C0sф+- Х-со5 2ф^-со8 27 Е = 1 R 1 + 1-Xfe--Хр,-у-COS ф -siпфsiп7 cos Ф 7~Т^ Т (р2С08ф-1- -Х-С05 2ф^ COS 27 COS е COS ф COS 7 -- cos ф -j- COS 2ф^ ~ COS 27. При подсчетах можно принимать / = 1х и Р2 = 4. Ускорение jpi поршня бокового цилиндра может быть получено путем дифференцирования (дважды) по времени приближенного выражения (26) пути jp = Rii \Е cos (а^ + Ф) -f cos (2а^ - G)]. (27) Определение основных размеров кривошипно-шатунного механизма с прицепным шатуном Величины г и I, входящие в уравнения (25) и (26), при ф н при 1=1; определяют различными способами. У современных звездообразных или многорядных двигателей применяют кривошипно-шатуиные механизмы с 1 = 7. У V-образных двухрядных двигателей i незначительно отличается от 1; например, у двигателей В-2 и АМ-34 при 1 = 60 значения 1 соответственно равны Ъ7° и 66°58. В случае, когда ф считая R, L w \ известными, определяют г, I и ф. Величину г выбирают наименьшей из возможных по конструктивным соображениям. Чем меньше г, тем ближе кинематика прицепного шатуна к кинематике главного. Считая размеры цилиндров главного и бокового ряда двигателя одинаковыми, принимают длину прицепного шатуна 1 ... 4 5 6 7 8 9 10 ... 19 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |